सप्ताहांत एक दूसरे के बाद आते हैं और फ्रेंको मॉर्बिडेली के लिए समान हैं, जिन्होंने नीदरलैंड में एक वास्तविक परीक्षा का अनुभव किया। तेज़ लैप के दौरान ड्राइवरों को दो बार बाधित करने के लिए शुक्रवार को दंडित किया गया, शनिवार को उनमें गति की कमी थी और उन्होंने 20वें स्थान पर क्वालीफाई किया। फ्रेंको मॉर्बिडेली दौड़ के आठवें लैप में दुर्घटनाग्रस्त हो गया और इसलिए जमीन पर गिर गया। पायलट घायल नहीं हुआ है, लेकिन मशीन की फ़ेयरिंग छीन ली गई है, और इसी में हमारी रुचि है।
इस दौरान, पूरी तरह से विस्थापित यामाहा एम1 एक पल के लिए बजरी के जाल में फंसा रहा, फिर उसे सुरक्षा लेन में वापस लाया गया और सुरक्षात्मक दीवार के सामने खड़ा कर दिया गया, जैसा कि एक ट्रेलर को उसके बॉक्स में वापस ले जाने से पहले प्रथागत है।
और इस दौरान आम तौर पर मोटरसाइकिलों को कवर नहीं किया जाता है। फ्रेंको मॉर्बिडेली की स्थिति को देखते हुए, कुछ फ़ोटोग्राफ़रों ने मशीन को उसके सुरक्षात्मक आवरण से ढकने से पहले एक फील्ड डे लिया था, यह विशेष रूप से पीटर बॉम का मामला है, जिन्होंने खुलासा किया कि यामाहा राइड हाइट डिवाइस की रचना कैसे की गई थी।
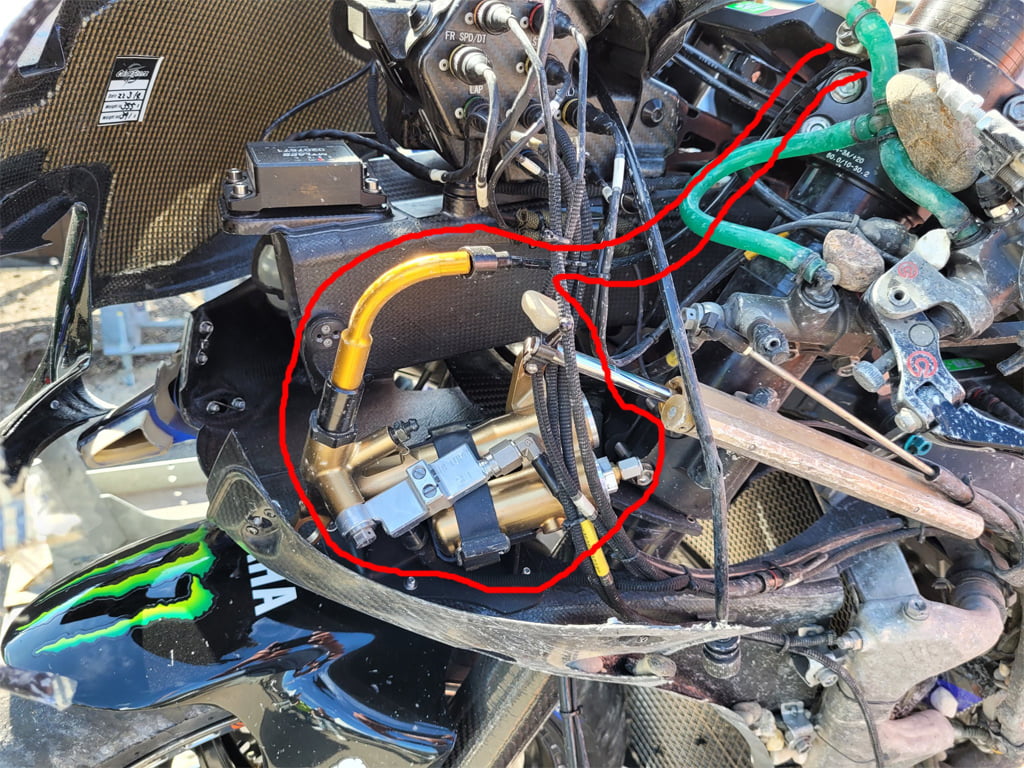
इस विषय पर, वह निर्दिष्ट करते हैं: “हम एम1 के सेमी-ऑटोमैटिक रियर राइड हाइट डिवाइस के हिस्से एसेन मोटोजीपी पर फ्रेंको मॉर्बिडेली की क्षतिग्रस्त मोटरसाइकिल को देखते हैं। जब मोड़ से पहले किसी भी समय सवार द्वारा डिवाइस को सक्रिय किया जाता है, तो मोटरसाइकिल मोड़ से बाहर निकलते ही सिस्टम सही समय पर सक्रिय हो जाएगा। किसी भी इलेक्ट्रॉनिक सक्रियण की अनुमति नहीं है. »
इस तस्वीर में, हम वास्तव में यामाहा राइड हाइट डिवाइस एक्चुएटर देख सकते हैं, जो दो सुनहरे एल्यूमीनियम मिश्र धातु सिलेंडर से बना है। ऐसा प्रतीत होता है कि लंबा दाहिना सिलेंडर एक जलवायवीय (वायु और तेल) विभाजक सिलेंडर है, जिसमें हवा और तेल को एक पिस्टन द्वारा अलग किया जाता है और एक श्रेडर वाल्व द्वारा बंद किया जाता है। वायवीय प्रणाली कथित तौर पर मौजूद है क्योंकि यह प्रणाली हाइड्रोलिक दबाव को नियंत्रित करना संभव बनाती है जो काफी अधिक है।

यह हाइड्रोलिक (हाइड्रो-वायवीय) प्रणाली वास्तव में उच्च दबाव पर काम करती है - 100 से अधिक बार - और यह सस्पेंशन को संपीड़ित या डीकंप्रेस करने के लिए मजबूर करके पीछे को ऊपर उठाने और कम करने की अनुमति देता है।
सवाल यह है कि नियमों के अनुसार, इलेक्ट्रॉनिक्स का उपयोग किए बिना ऐसा कैसे किया जाए, लेकिन यह प्रणाली केवल कोने से बाहर निकलने पर राइड हाइट डिवाइस को सक्रिय करती है, बटन सक्रिय होने पर नहीं। हालाँकि, थोड़ा आयताकार एल्यूमीनियम रंग के हिस्से जो दो सुनहरे बेलनाकार ट्यूबों के ऊपर स्थित हैं, उन्हें इस उपकरण के अर्ध-स्वचालित सक्रियण में योगदान देना चाहिए। ऐसा प्रतीत होता है कि यह रियर सस्पेंशन में एक मैकेनिकल सेंसर से संबंधित है।
नियम क्या कहता है?
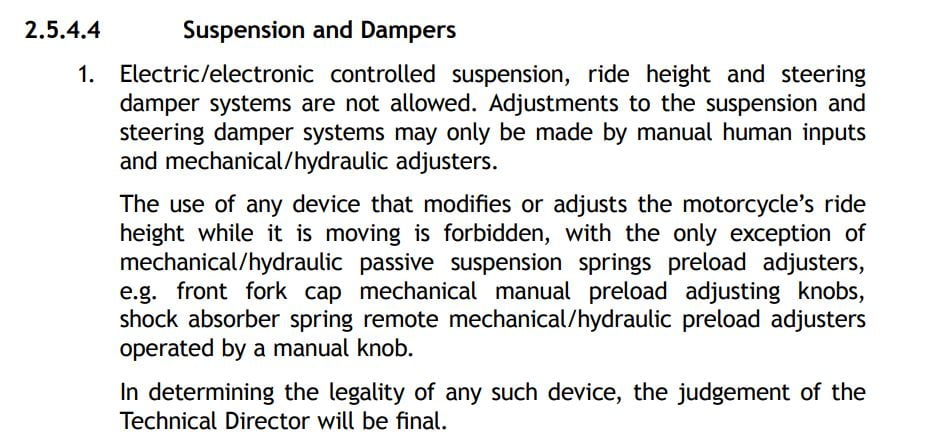
मोटोजीपी नियमों में, जिसका एक उद्धरण ऊपर उपलब्ध है, यह निर्धारित किया गया है कि: “इलेक्ट्रिकली/इलेक्ट्रॉनिक रूप से नियंत्रित सस्पेंशन, ग्राउंड क्लीयरेंस और स्टीयरिंग डैम्पर सिस्टम की अनुमति नहीं है। सस्पेंशन और स्टीयरिंग डैम्पर सिस्टम में समायोजन केवल मैन्युअल मानव हस्तक्षेप और मैकेनिकल/हाइड्रोलिक समायोजन उपकरणों द्वारा किया जा सकता है।
किसी भी उपकरण का उपयोग जो गति के दौरान मोटरसाइकिल की सवारी की ऊंचाई को बदलता या समायोजित करता है, यांत्रिक/हाइड्रोलिक निष्क्रिय निलंबन स्प्रिंग प्रीलोड समायोजन उपकरणों के एकमात्र अपवाद के साथ निषिद्ध है, उदाहरण के लिए। फ्रंट फोर्क कैप, मैनुअल प्रीलोड एडजस्टमेंट के लिए मैकेनिकल डायल, रिमोट शॉक स्प्रिंग मैकेनिकल/हाइड्रोलिक प्रीलोड एडजस्टर एक मैनुअल बटन द्वारा संचालित होते हैं। »
जाहिर है, यह एम्प्लीफिकेशन डिवाइस, जिसे राइड हाइट एडजस्टर के मैकेनिकल सिस्टम के लिए ट्रिगर के रूप में इस्तेमाल किया जा सकता है, लंबे समय से तकनीकी टीमों के प्रमुखों में रहा है, यह सुनिश्चित करने के विचार के साथ कि सवारों को इसकी आवश्यकता नहीं है निर्धारित करें कि सर्किट में उन्हें इस सिस्टम को कहाँ सक्रिय करना चाहिए या नहीं।
अर्ध-स्वचालित प्रणाली क्यों?
जब टीमों ने राइड हाइट डिवाइस का उपयोग करना शुरू किया, तो उन्होंने पाया कि वे बहुत तेज़ी से गिर रहे थे। मशीन के पिछले सिरे को तेजी से नीचे करने से पूरी मशीन का संतुलन बिगड़ जाएगा, जिससे सस्पेंशन उछल जाएगा, जिससे यह अस्थिर हो जाएगा।
इससे निजात पाने के लिए, टीमों ने इन उपकरणों को और विकसित किया, ताकि वे पहले की तुलना में बहुत धीरे-धीरे कम हो जाएं। लेकिन इस विकास के साथ भी, उन्होंने पाया कि वे कभी-कभी बाइक को अस्थिर कर सकते हैं और इसका बहुत कुछ कारण तब था जब सवारों ने डिवाइस को सक्रिय कर दिया था।

तो उनके विकास में अगला कदम जो हम वर्तमान में डुकाटी और अप्रिलिया के साथ देख रहे हैं, उन्हें स्वचालित बनाना है। दरअसल, डुकाटी और अप्रिलिया ने एक ऐसा सिस्टम विकसित किया है जो राइडर को सही समय पर राइड हाइट डिवाइस को एक्टिवेट करने की जिम्मेदारी से मुक्त कर देता है। जब एक कोने से बाहर निकलते समय कांटे यथासंभव आराम करते हैं, तो तकनीकी टीमों ने एक हाइड्रोलिक प्रणाली विकसित की है जो एक वाल्व को ट्रिगर करती है और राइड हाइट डिवाइस को सक्रिय करती है।
लेकिन अगर यह हर बार कांटे के अपनी पूरी लंबाई तक बढ़ने पर सक्रिय हो जाए, तो यह एक बड़ी समस्या होगी। इसलिए, उनके पास एक अंतर्निहित सुरक्षा है: राइडर को सिस्टम को "आर्म" करने के लिए एक बटन/लीवर को दबाना/दबाना होगा, ताकि राइड हाइट डिवाइस अगली बार फोर्क पूरी तरह से रिलीज़ होने पर ही सक्रिय हो।
यह एक चतुर तंत्र है और यह दर्शाता है कि डुकाटी द्वारा पहली बार प्रस्तुत किया गया यह उपकरण कितना विकसित किया गया है।