Os sistemas de detecção de ponto cego são onipresentes nos automóveis atuais. Quando se trata de veículos de duas rodas, a Ducati Multistrada V4 S foi a primeira motocicleta a oferecer esta tecnologia em 2021. Embora os dispositivos de monitorização informem os condutores e motociclistas sobre perigos potenciais, os sistemas ainda deixam espaço para erros humanos. As novas tecnologias Vehicle-to-Vehicle (V2V) e Vehicle-to-Everything (V2X) visam preencher esta lacuna e limitar os acidentes.
Se os sistemas avançados de assistência à condução (ADAS) estão a generalizar-se e a equipar um bom número de veículos da frota francesa, desempenhando um papel positivo na segurança dos utilizadores de veículos motorizados de duas rodas, evitando certas situações perigosas, o risco, a sua o desempenho permanece condicionado pelo alcance de detecção dos sensores utilizados (câmeras, radares). Além disso, a sua eficácia deteriora-se em caso de obstáculo entre o veículo e o objeto de perigo.
Se olharmos para o contexto, os motociclistas continuam, no entanto, sobre-representados na mortalidade, porque a assistência é limitada pelo comportamento dos outros utilizadores. Com efeito, quando o outro utilizador está na origem do conflito, a análise dos relatórios de acidentes com lesões corporais revela que em 63% dos casos, este último não detecta a moto.

O aparecimento de tecnologias de conectividade oferece então a possibilidade de aumentar o campo de detecção em torno dos veículos. Um projeto de pesquisa liderado pela UTAC CERAM e financiado pela Fundação MAIF propõe a utilização de tecnologias que permitam a comunicação entre veículos para reduzir esta perda e, mais particularmente, para evitar colisões entre motociclos e automóveis.
Há mais de uma década, fabricantes e fornecedores de equipamentos trabalham no desenvolvimento de sistemas de comunicação entre veículos, V2V (Vehicle to Vehicle), mas também V2X (Vehicle to Everything).

Utilizando tecnologias de comunicação entre veículos, um sinal é enviado aos condutores (automóvel e/ou moto) em caso de potencial risco de colisão. A probabilidade de colisão é calculada a partir das posições e velocidades instantâneas dos veículos. No primeiro caso, trata-se de avisar o condutor e deixá-lo reagir por conta própria. Uma vez enviado o alerta, caso não haja reação do condutor, uma automação de bordo assume o controle para evitar a colisão. Neste caso, a tecnologia permite que o veículo reaja sozinho o mais rápido possível. Eliminamos então o tempo de reação do motorista (1,2 segundos) entre o recebimento de um alerta e sua ação final no veículo para evitar o perigo.
Resumindo, o objetivo é que cada veículo esteja em contato com seu ambiente para analisá-lo e compreendê-lo para interagir da melhor forma possível. É também isso que permitirá aumentar os níveis de autonomia dos veículos. Já que entrámos numa era em que podemos partilhar a nossa localização diretamente com os nossos entes queridos, porque não colocar esta conectividade ao serviço da segurança.
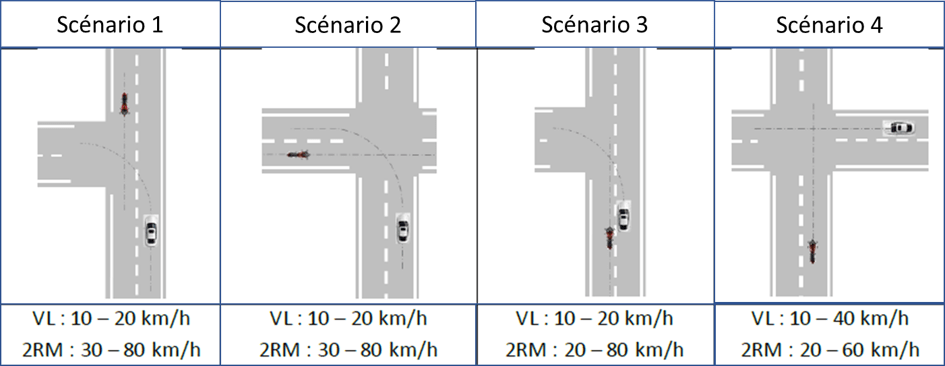
Foram definidos quatro cenários típicos de acidentes. Entre eles, o carro virando à esquerda e cortando a estrada do motociclista que vinha em sentido contrário ou o desrespeito à prioridade à direita em um cruzamento, permitiu assim testar a eficácia da comunicação V2X no centro de Linas- Teste de Monthléry.
Nesse caso, o sistema emite um alerta ao motorista do carro ao detectar a chegada de uma motocicleta para que ele possa reagir. Se este não for o caso, o veículo de 4 rodas trava automaticamente. Por outro lado, uma motocicleta equipada com o mesmo sistema V2X não intervém automaticamente na mesma situação, para evitar perda de equilíbrio ou mesmo queda.
“O V2X tem um grande potencial em termos de segurança rodoviária para os motociclistas,” observou Théo Charbonneau, diretor de atividades do projeto UTAC CERAM Millbrook. “Reside nomeadamente na sua capacidade de percebê-los no fluxo do trânsito para informar os veículos e deixá-los reagir, prioritariamente, que tendem a ser mais estáveis na estrada. »
Este sistema de interconectividade representa assim o futuro da segurança, no que diz respeito à redução de acidentes, um futuro que se aproxima uma vez que a organização Euro NCAP planeia iniciar avaliações destes sistemas a partir de 2025.