



डच ग्रां प्री के एफपी2 के दौरान मार्क मार्केज़ को एक इलेक्ट्रॉनिक समस्या का सामना करना पड़ा: उनकी मशीन द्वारा हवा में उड़ाए जाने पर, आठ बार के विश्व चैंपियन ने खुद को बजरी के जाल में पाया, लेकिन एक भयावह आकृति के बाद चमत्कारिक रूप से सुरक्षित बच गए, जो उनकी दुर्घटना की बहुत याद दिलाती थी। 2020 में जेरेज़। सौभाग्य से, इससे उनके दाहिने ह्यूमरस की चोट की उपचार प्रक्रिया बाधित नहीं हुई। हालाँकि, मीडिया डीब्रीफिंग के दौरान, मार्क मार्केज़ इस बात को लेकर बहुत चिंतित थे कि RC213V दुर्घटना का कारण क्या था, उन्होंने कहा कि यह पहला मामला नहीं था जिससे होंडा को निपटना पड़ा।
ऐसा प्रतीत होता है कि मार्क मार्केज़ को जो हाईसाइड का अनुभव हुआ वह उनकी होंडा RC213V के पिछले टायर के ट्रैक्शन कंट्रोल सिस्टम की विफलता के कारण हुआ, जो कुछ विशिष्ट परिस्थितियों में होता है. सड़क मोटरसाइकिल पर, कर्षण नियंत्रण ईसीयू में एकीकृत एक इलेक्ट्रॉनिक प्रणाली है जो हमेशा आगे और पीछे के पहियों की गति की तुलना करती है, और थ्रॉटल बटरफ्लाई, इग्निशन या इंजेक्शन के माध्यम से इंजन टॉर्क को कम करके इसे कम करने के लिए जिम्मेदार है। एक प्रतिस्पर्धी मोटरसाइकिल पर, इन प्रोटोटाइप के असाधारण प्रदर्शन को देखते हुए, अन्य पैरामीटर भी ध्यान में आते हैं।
तो कर्षण नियंत्रण कैसे काम करता है? ग्राफ़ को समझने के लिए, जो बाइक के संचालन के लगभग दस सेकंड को कवर करता है, यह जेरेज़ में पांचवां मोड़ है, जिसे सिटो पोंस कोने के रूप में भी जाना जाता है, जिसे सर्किट के मानचित्र पर पीले क्षेत्र द्वारा दर्शाया गया है। इस मोड़ में, एक मोटोजीपी राइडर लगभग 128 किमी/घंटा की गति से गुजरता है, जो तीसरे गियर पर डाउनशिफ्ट हो जाता है। यह कोना एक "स्लिप ज़ोन" भी है, जो कर्षण नियंत्रण प्रदर्शित करने के लिए बिल्कुल उपयुक्त है। टर्न 5 से बाहर आते हुए, ड्राइवर सीधे प्रवेश करने से पहले गियर 4 और 5 को बदलता है।
इस टेलीमेट्री डेटा को समझने में आसान बनाने के लिए, इसे खंडों में विभाजित करना आवश्यक है।
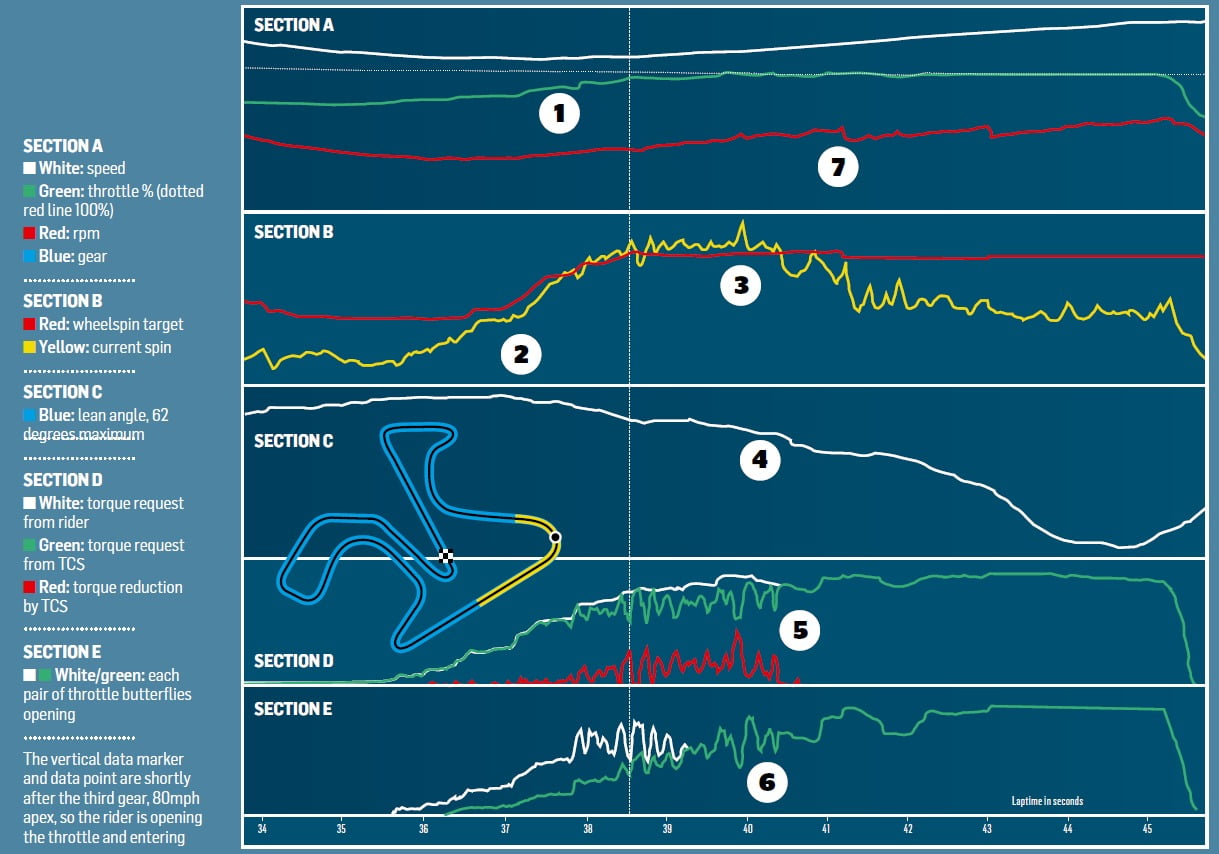
उपरोक्त ग्राफ़ में, हरी रेखा थ्रॉटल उद्घाटन प्रतिशत है। बिंदीदार सफेद रेखा 100% गैस है। यहां, सवार कई चरणों में थ्रॉटल खोलता है: वह अधिक थ्रॉटल लगाता है, फिर जब उसे टायर फिसलने का अहसास होता है तो वह अपनी थ्रॉटल क्रिया को 2 से 10% तक कम कर देता है। जैसे ही टायर पकड़ में आता है, यह अधिक गैस लगाता है, फिर कुछ वापस देता है इत्यादि।
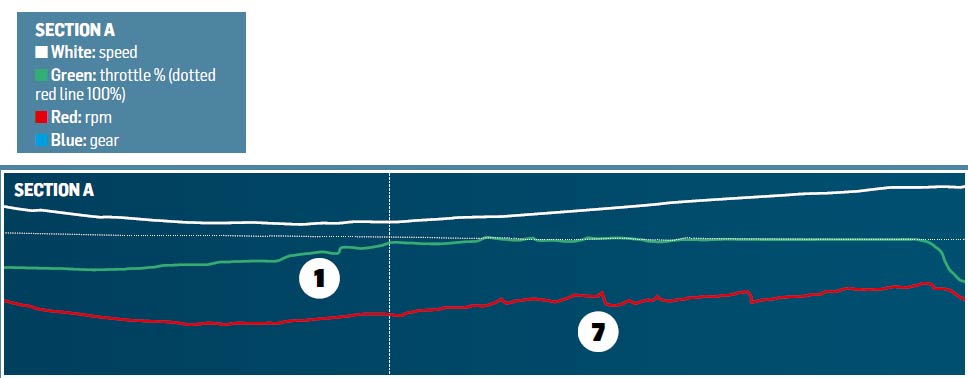
ग्राफ़ के इस क्षेत्र पर, लाल रेखा पीछे के टायर की स्लिप का संदर्भ है, पीली रेखा पीछे के टायर का वास्तविक घुमाव है। जब मोटरसाइकिल अपने अधिकतम झुकाव कोण पर पहुंचने के बाद उठना शुरू करती है, तो सवार की पसंद के आधार पर स्लिप लक्ष्य बहुत कम होता है: 0 से 2%।
जैसे ही सवार कोने से बाहर निकलने के लिए अपनी मशीन उठाता है, फिसलन सहनशीलता बढ़ जाती है क्योंकि पिछला टायर और सवार इसे अधिक आसानी से संभाल सकते हैं। अधिकांश सवार एक मोड़ से बाहर निकलते समय कर्षण नियंत्रण को अधिकतम 12 से 15% स्लिप देने की अनुमति देते हैं - पिछले पहिये की गति और मोटरसाइकिल की गति के बीच का अंतर।
इसलिए, ट्रैक्शन कंट्रोल के लिए व्हील स्पीड सेंसर महत्वपूर्ण है, ताकि ईसीयू इसकी तुलना इंजन की गति, गियर अनुपात और गियर अनुपात के आधार पर गणना किए गए सिद्धांत से कर सके।
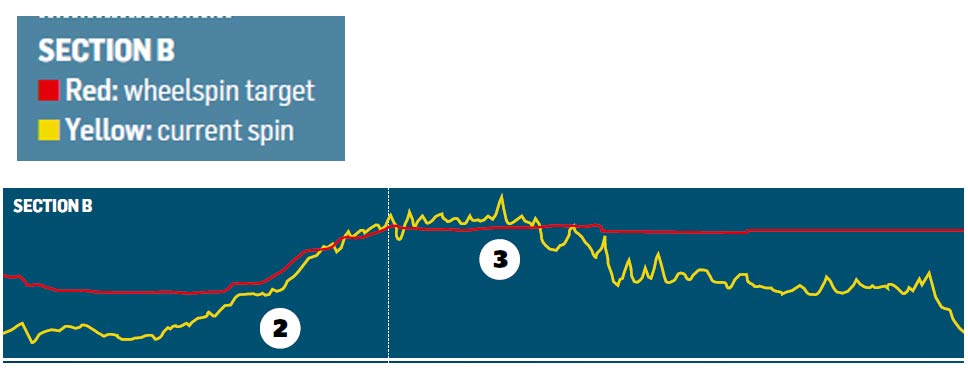
यहां लाल रेखा रियर टायर स्लिप संदर्भ भी है, पीली रेखा वास्तविक घुमाव है जबकि नीली रेखा लीन कोण है। टेलीमेट्री डेटा 62° से ऊपर के वक्र में राइडर द्वारा लिए गए कोण पर वास्तविक समय की ग्राफिकल जानकारी प्रदान करता है। हमने देखा कि जब मोटरसाइकिल अधिकतम कोण पर होती है, तो व्हील स्लिप न्यूनतम होती है। और यह अच्छा है, क्योंकि इससे पतन हो सकता है।
जब सवार अपनी मोटरसाइकिल उठाता है तो फिसलन अधिक होती है, यहां जब नीली रेखा नीचे की ओर जाती है।
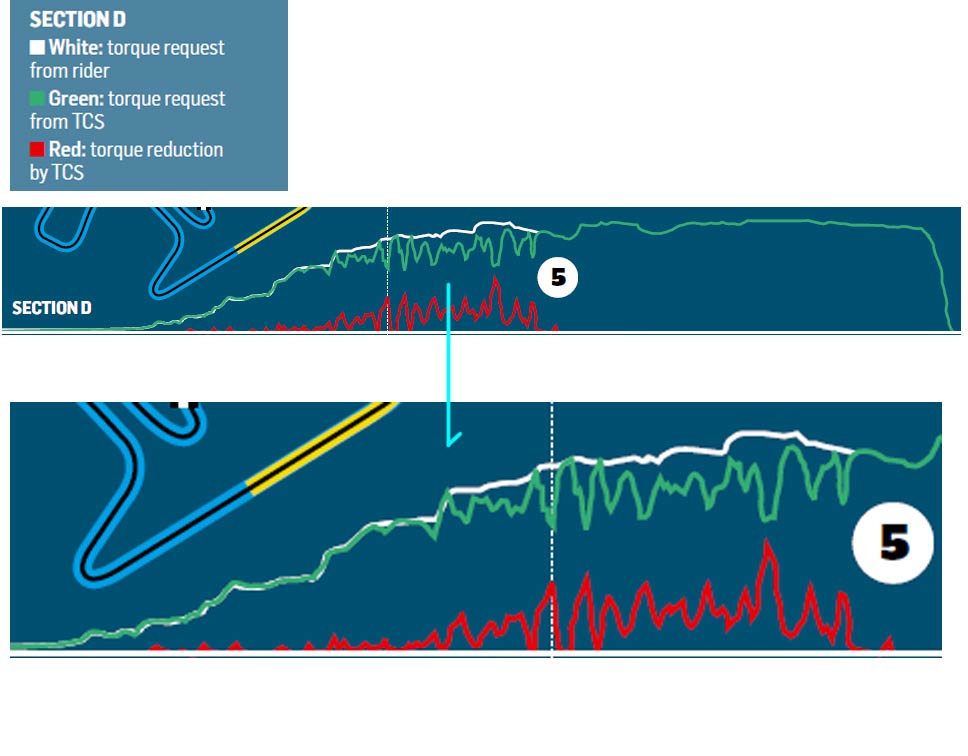
इस ग्राफ पर, सफेद रेखा राइड-बाय-वायर थ्रॉटल ग्रिप के माध्यम से राइडर द्वारा अनुरोधित टॉर्क है, हरी रेखा स्लिप के आधार पर ट्रैक्शन कंट्रोल द्वारा दिया गया टॉर्क है, और लाल लाइन ट्रैक्शन कंट्रोल के माध्यम से टॉर्क में कमी को इंगित करती है। .
तो हरी रेखा सफेद रेखा से घटाई गई लाल रेखा है और वितरित वास्तविक टॉर्क को इंगित करती है। सवाल यह है कि राइडर की मांग और ट्रैक्शन कंट्रोल द्वारा प्रदान की जाने वाली चीजें अलग-अलग क्यों हैं?
सेक्शन डी पर, सफेद रेखा दर्शाती है कि सवार थ्रॉटल को लेकर लालची हो रहा है: पिछले पहिये पर स्पीड सेंसर यह पता लगाता है कि टायर की गति कैलिब्रेटेड गति सहनशीलता/संदर्भ से अधिक है। इसके कारण मार्कर 3 पर व्हील स्लिप चरम पर पहुंच जाती है, जिसके लिए तत्काल कर्षण नियंत्रण कार्रवाई की आवश्यकता होती है। इसका परिणाम पिछले टायर को आपूर्ति किए गए टॉर्क में कमी है। हम ध्यान दें कि सवार थ्रॉटल को नहीं काटता है, क्योंकि उसने मोटरसाइकिल को पर्याप्त रूप से सीधा कर लिया है और वह जानता है कि कर्षण नियंत्रण प्रभावी है। तो, हरे रंग की रेखा ही ड्राइवर और उसकी टीम द्वारा निर्धारित सहनशीलता को बनाए रखने के लिए पीछे के टायर के फिसलने का कारण बनती है।
मोटोजीपी में, कर्षण नियंत्रण झुकाव कोण के आधार पर भिन्न होता है, यह अपने अधिकतम पर होता है जब बाइक 40 और 60° के बीच झुकती है। मैग्नेटी मारेली सॉफ़्टवेयर में, इसे कई मापदंडों द्वारा नियंत्रित किया जाता है और तीन तरीकों से व्हील स्लिप को कम किया जाता है: थ्रॉटल वाल्व को बंद करके और/या इग्निशन में देरी करके और/या एक या कई सिलेंडरों के इग्निशन को काटकर।
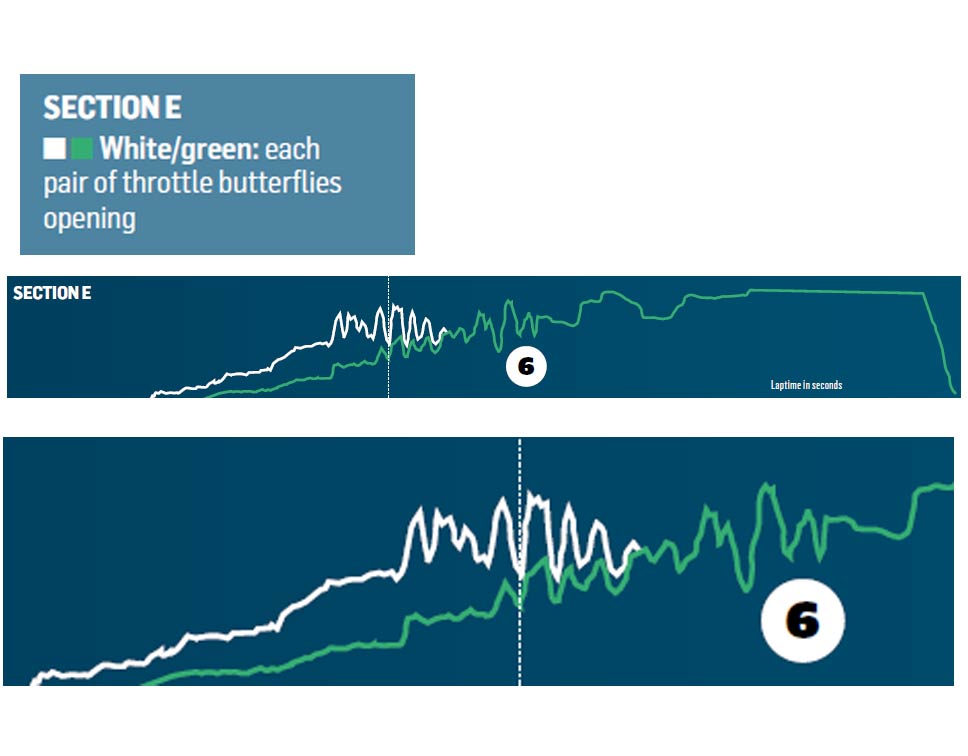
अंत में, अनुभाग ई में जो ऊपर दोहराया गया है, दो रेखाएँ हैं, हरी और सफेद, जो अलग-अलग व्यवहार करती हैं और फिर एक में विलीन हो जाती हैं। उनमें से प्रत्येक 2 तितलियों के एक सेट के अनुरूप है, या तो सामने वाले सिलेंडर के लिए या वी इंजन के पीछे वाले सिलेंडर के लिए।
कोने से बाहर निकलने की शुरुआत में, थ्रॉटल तितलियों के दो जोड़े सिंक्रनाइज़ नहीं होते हैं - वे सुचारू बिजली वितरण के लिए असममित रूप से खुलते हैं। कई टीमें थ्रॉटल बॉडी की एक जोड़ी को सीधे थ्रॉटल पर मैप करती हैं, इसलिए राइडर का पिछले टायर से सीधा संबंध होता है, जबकि दूसरी जोड़ी को कर्षण नियंत्रण द्वारा प्रबंधित किया जाता है।
ड्राइवर बहुत अधिक टॉर्क की मांग करता है, जो सफेद रेखा पर दिखाई देता है, और 2 थ्रॉटल बॉडी में से एक द्वारा वितरित किया जाता है, लेकिन ट्रैक्शन कंट्रोल द्वारा नियंत्रित दूसरा थ्रॉटल बॉडी टॉर्क को सीमित करता है, क्योंकि पिछला टायर रोटेशन सेंसर अत्यधिक टॉर्क का पता लगाता है घूर्णन. फिर, जैसे-जैसे फिसलन कम होती जाती है, सवार द्वारा अनुरोधित सारा टॉर्क कर्षण नियंत्रण द्वारा वितरित किया जाता है।
मोटोजीपी में, सवारों की सेटिंग के आधार पर, जब थ्रॉटल पहली बार खोला जाता है, तो ट्रैक्शन नियंत्रण टॉर्क को 50% तक कम कर सकता है, जो इंजन को लगभग 10 एचपी तक सीमित कर देता है।
थ्रॉटल वाल्व को बंद करना टॉर्क को कम करने का सबसे अच्छा तरीका है, लेकिन यह आपातकालीन स्थितियों में पर्याप्त नहीं है, जब सिस्टम इग्निशन देरी या यहां तक कि कट-ऑफ भी लागू करता है, तो टॉर्क को और अधिक तेज़ी से कम करता है। इसे कानों से सुना जा सकता है: इग्निशन में देरी के कारण एग्जॉस्ट में धीमी आवाज आती है, जबकि इग्निशन में कटौती के कारण इसका उल्टा असर होता है। हालाँकि, इंजन टॉर्क पर इन "हिंसक" हस्तक्षेपों का मोटरसाइकिल के व्यवहार पर भी प्रभाव पड़ता है, और उदाहरण के लिए, सस्पेंशन पंप करने का कारण बन सकता है।
हमें यह ध्यान रखना चाहिए कि यह विश्लेषण केवल एक कोने से संबंधित है, जिसे पार करने में मोटोजीपी में लगभग 10 सेकंड लगते हैं। यह हमें याद दिलाता है कि प्रीमियर श्रेणी की रैंकिंग में शीर्ष पर आने के लिए ड्राइवरों और उनकी तकनीकी टीमों का विश्लेषण और कड़ी मेहनत कितनी जटिल है!

मार्क मार्केज़ के पतन के संबंध में उन्होंने इलेक्ट्रॉनिक्स को दोषी ठहराया। “ Sहाईसाइड करते समय केवल होंडा सवार ही गिरते हैं और इसीलिए मैं इंजीनियरों से आग्रह कर रहा हूं। यह 2020 में जेरेज़ में हुई दुर्घटना के समान है", जोड़ने से पहले, होंडा ड्राइवर ने इन दुर्घटनाओं में देखे गए पैटर्न के बारे में जोर दिया। इन गिरावटों से बचने के लिए हमें इलेक्ट्रॉनिक्स को समझने की जरूरत है। यदि आप वही करते हैं जो आपने पिछले दौर में किया था लेकिन कम कोण के साथ, तो कुछ गड़बड़ है और हमें इसका पता लगाने की आवश्यकता है। मुझे इस मोड़ पर गिरने की उम्मीद नहीं थी। मैंने यह देखने के लिए थ्रॉटल नहीं काटा कि ट्रैक्शन कंट्रोल आएगा या नहीं और बाइक वापस आ जाएगी या नहीं » उन्होंने स्पष्ट किया।
दरअसल, इनलाइन 4एस की तुलना में वी4 इंजन के लिए ट्रैक्शन कंट्रोल अलग तरह से सेट किया गया है। V4 का संकीर्ण इंजन जाइरोस्कोपिक प्रभाव को कम करता है, जिससे सवार बाइक को अधिक आसानी से कोनों में ले जा सकता है। एक इनलाइन चार, अपने लंबे क्रैंकशाफ्ट के साथ, जब चालक एक वक्र में प्रवेश करना चाहता है, तो उसके प्रक्षेप पथ से हटना अधिक कठिन होता है। लेकिन एक बार जब मोटरसाइकिल मोड़ पर होती है, तो जाइरोस्कोपिक प्रभाव सवार को अपने प्रक्षेप पथ को बनाए रखने में मदद करता है। यह एक कारण है कि 4-सिलेंडर इन-लाइन मोटोजीपी प्रोटोटाइप कोनों में अधिक कुशल हैं।
इस प्रकार, पंक्ति में 4 सिलेंडरों के विपरीत, जो वक्रों में मार्ग को अनुकूलित करने और अपनी गति पर बने रहने के लिए जितना संभव हो सके अपने प्रक्षेप पथ को गोल करते हैं, V4 इंजन से लैस मोटोजीपी प्रोटोटाइप मोड़ को तोड़ते हैं और प्रक्षेप पथ में एक वी आकार होता है : सवार मशीन को उठाने और कोने से बाहर निकलने से पहले शीर्ष तक पहुंचने के लिए बाइक के पिछले हिस्से को थोड़ा सा मोड़ते हैं। ऐसा प्रतीत होता है कि मार्क मार्केज़ का मतलब यह है कि RC213V की इलेक्ट्रॉनिक ट्रैक्शन कंट्रोल सेटिंग्स इष्टतम नहीं थीं और कॉर्नरिंग में सहायता के लिए इस मशीन के लिए आवश्यक स्लिप सेटिंग्स की सीमा से अधिक थीं।
स्टीफ़न ब्रैडल ने तब से इस प्रकरण पर अधिक विवरण प्रदान किया है: " मिसानो में 23/24 जून को अंतिम परीक्षण के दौरान हमें यह समस्या आई थी और हमने इसे हल कर लिया। लेकिन अपडेट केवल शनिवार को एसेन में मार्क के लिए लागू किया गया था। यह उन चीजों में से एक थी जो मिसानो में हमारे एजेंडे में थीं। हमने इस पर काम किया. शनिवार को एसेन में रेपसोल टीम के साथ था। और यह काम कर गया ". यह समायोजन की कला है, यह जानना कि सुरक्षा, दक्षता और खतरे के बीच समझौता कैसे किया जाए!

