Le Piaggio MP3 est en production depuis 2006 et a essentiellement créé son propre marché pour les scooters à trois roues inclinés, mettant 50% de caoutchouc en plus sur la route à l’avant et ajoutant de la stabilité pour aider à attirer les conducteurs qui pourraient être prudents quant à l’utilisation de scooters conventionnelles à 2 roues.
Cette année, Piaggio a déposé une demande de brevet montrant une évolution de l’idée qui augmente à nouveau le nombre de roues pour créer une machine à quatre roues, qui tourne toujours comme une moto et prend le strict minimum d’espace sur la route.
Bien que Piaggio ait déjà le MP3 dans sa gamme, ce n’est pas sur ce modèle que ce scooter est basé : il est dérivé d’un autre scooter à trois roues inclinable, le MyMoover, qui inverse la disposition du MP3. Au lieu d’avoir deux roues avant et une à l’arrière, le MyMoover en a une à l’avant et deux à l’arrière. Un peu comme le scooter Honda Gyro, qui est populaire auprès des livreurs au Japon, le MyMoover pivote au centre. Les deux roues arrière, le moteur et la transmission restent tout le temps en position verticale, tandis que l’avant s’incline. Comme le Gyro, MyMoover est destiné à des fins de livraison urbaine.
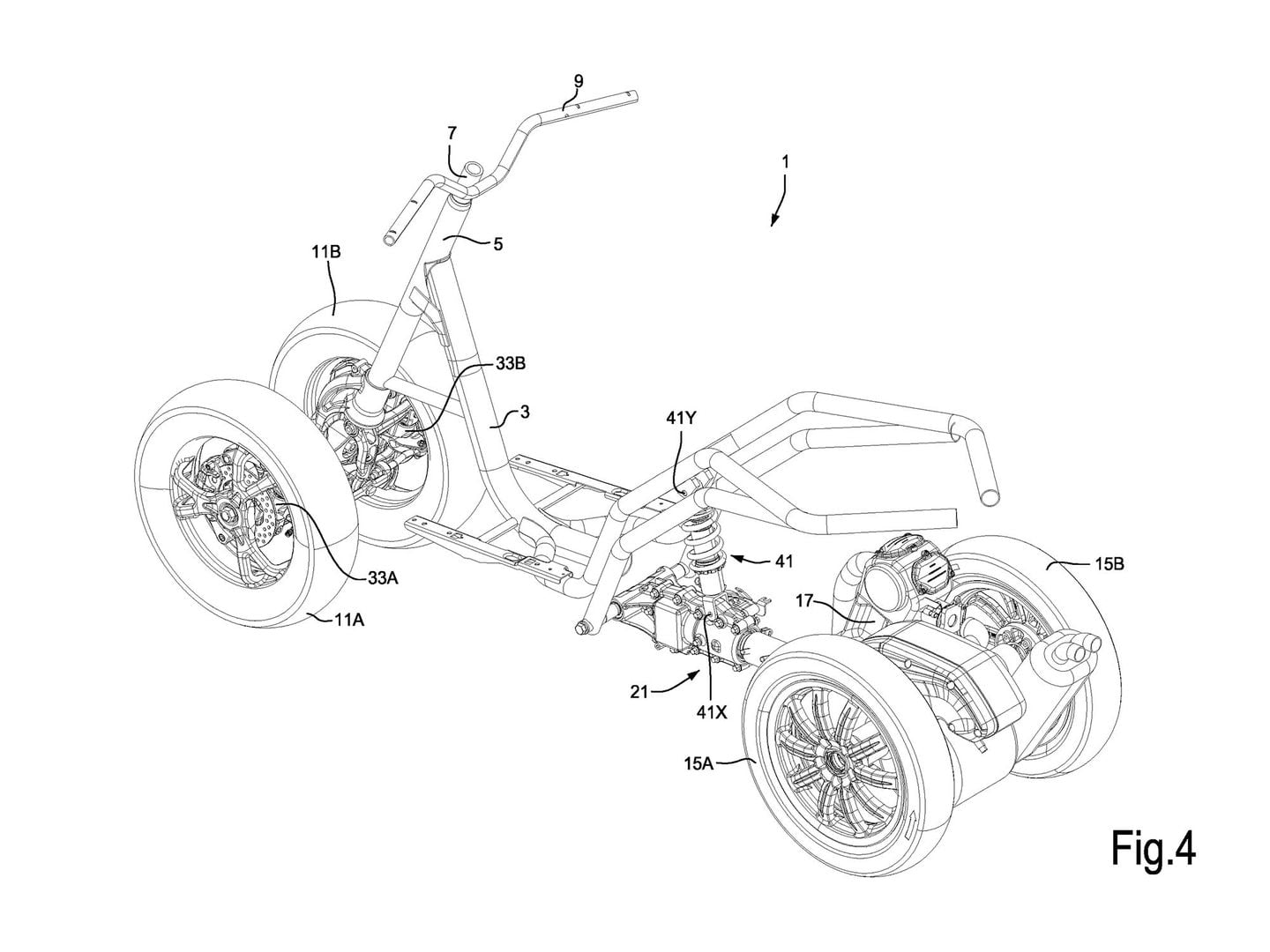
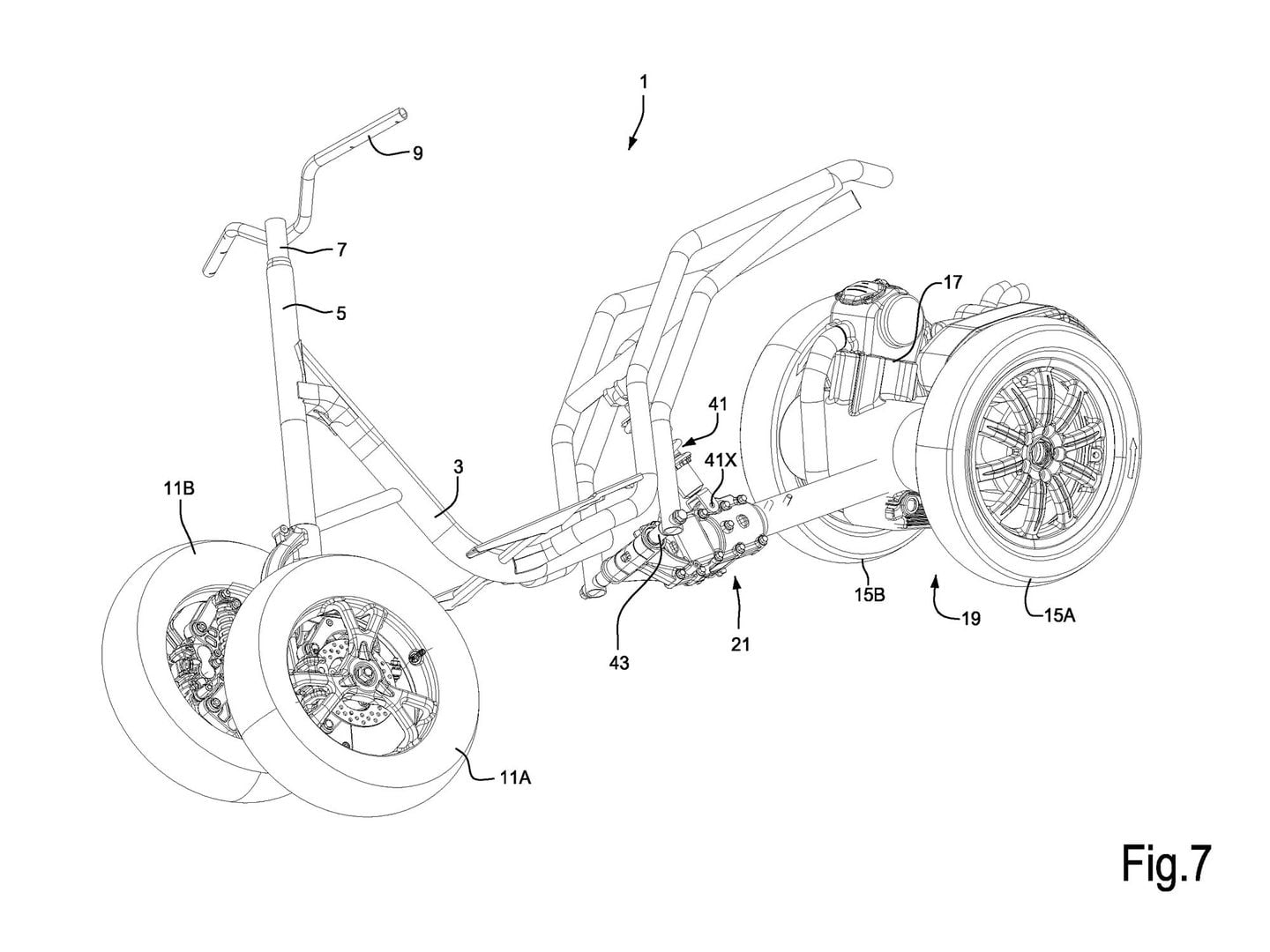
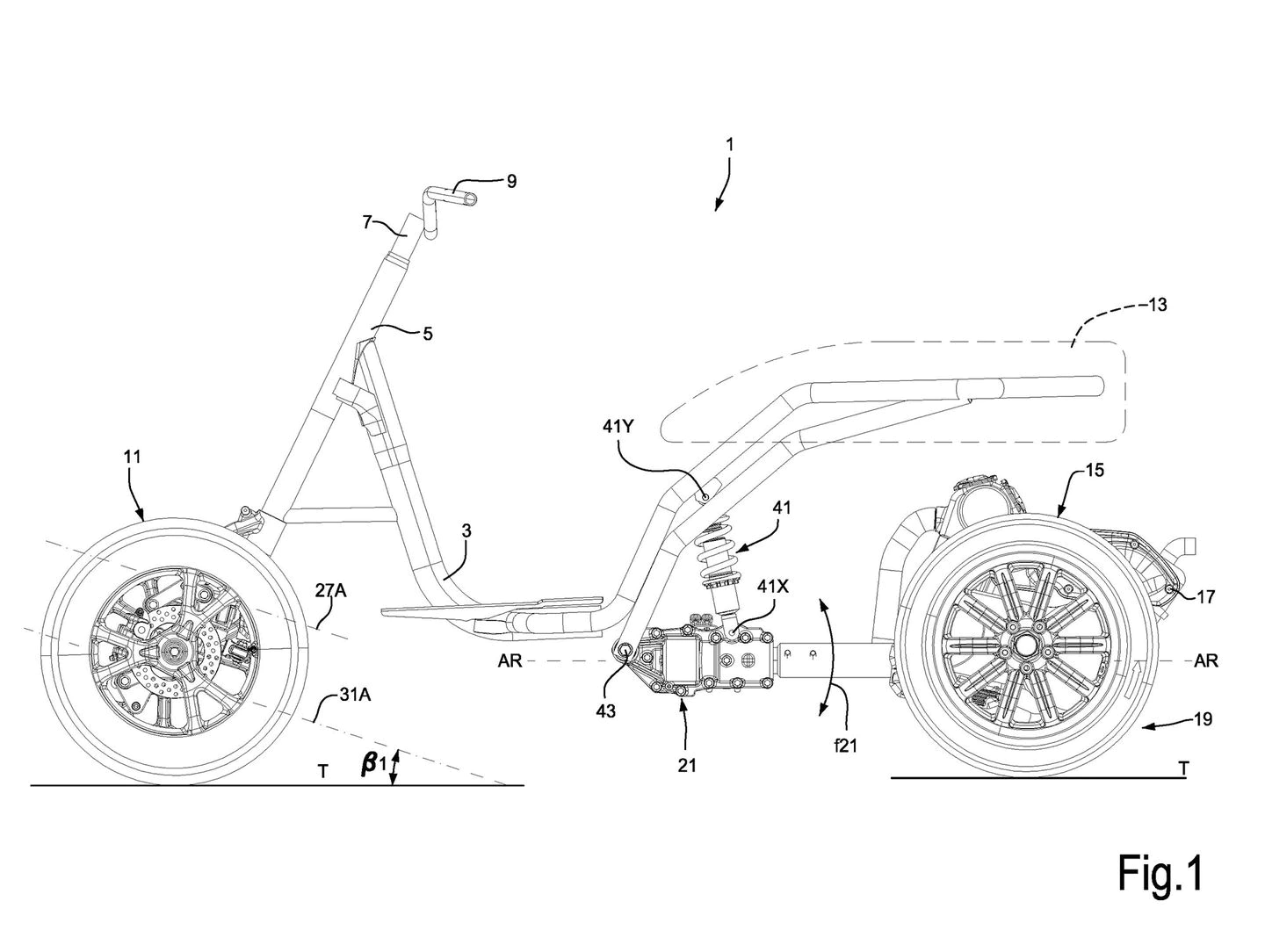
Pour ce brevet, Piaggio a repris toute la partie arrière du MyMoover, y compris son moteur à quatre temps de 125 cc et la transmission à deux roues qui pivote sur le bras oscillant, mais a ajouté une nouvelle partie avant à deux roues. Mais il n’utilise pas non plus la partie avant du MP3. Là où cette machine a des entretoises verticales allant jusqu’à un système d’inclinaison de style parallélogramme monté au-dessus des roues, ce scooter a une conception plus simple, plus légère et moins chère. La configuration du parallélogramme est entre les roues, et lorsque le guidon tourne, toute la configuration frontale tourne, plutôt que d’utiliser une tringlerie connectée à chaque roue avant comme le fait le MP3.
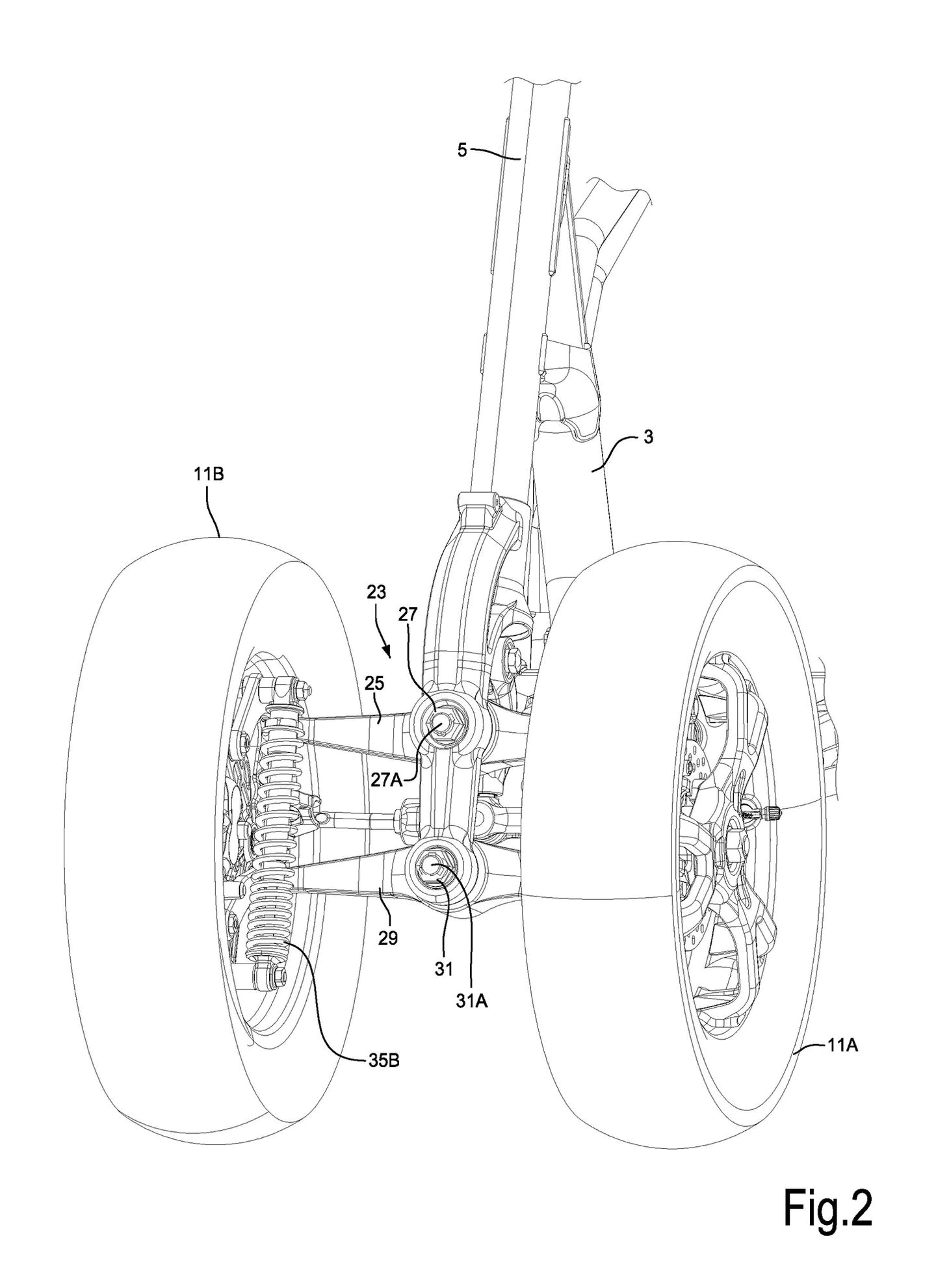
La suspension à l’avant n’est pas illustrée en détail mais semble être une variante du système de liaison Watts que Piaggio a breveté plus tôt cette année. Elle devrait imiter approximativement le mouvement linéaire d’une fourche télescopique, plutôt que l’arc d’un système de liaison avant ou arrière, tout en donnant la possibilité d’incorporer une géométrie pro ou anti-plongée. Impressionnant, l’ensemble du système est intégré à l’intérieur des jantes de la roue avant, ce qui permet de les monter plus près les unes des autres, bien que cela limitera inévitablement le débattement total de la suspension disponible.
Comme nous l’avons souvent vu chez Piaggio, les dessins présentés dans ce brevet sont extrêmement détaillés, donnant l’impression qu’il existe probablement au moins un prototype réel qui en a constitué la base. La production de ce scooter à quatre roues dépendra probablement du succès d’un tel prototype et de la question de savoir si, avec une suspension avant plus complexe et une roue supplémentaire, il peut être fabriqué à un prix suffisamment bas pour être une proposition commercialisable.