La lecture des brevets déposés par les différents constructeurs impliqués en MotoGP est toujours instructive, mais cette fois l’invention technique de Yamaha pour trouver de l’adhérence arrière ne s’appliquera malheureusement pas à la M1…
Petit retour en arrière.
Depuis, fin 2018, Ducati a introduit toute une série de systèmes
en MotoGP, destinés limiter le cabrage et augmenter l’adhérence en
accélération.
Cela a commencé avec le holeshot
device essayé par Jack Miller puis a
rapidement débouché sur les ride height devices, arrière
puis avant.
À partir de 2023, les ride height devices ont été
interdits à l’avant, seuls subsistant aujourd’hui les holeshot
devices pour le départ.
Les ride height devices arrières ont continué à être
développé jusqu’en 2026 (Ducati utilise un nouveau système cette
année) mais seront interdits en 2027.
C’est pourquoi, en voyant ce brevet déposé par Michiharu Hasegawa (un employé de Yamaha Hatsudoki Kabushiki Kaisha), censé procurer de l’adhérence à l’arrière, nous avons tout d’abord cru à une sorte de palliatif à la future réglementation du MotoGP…
Description :
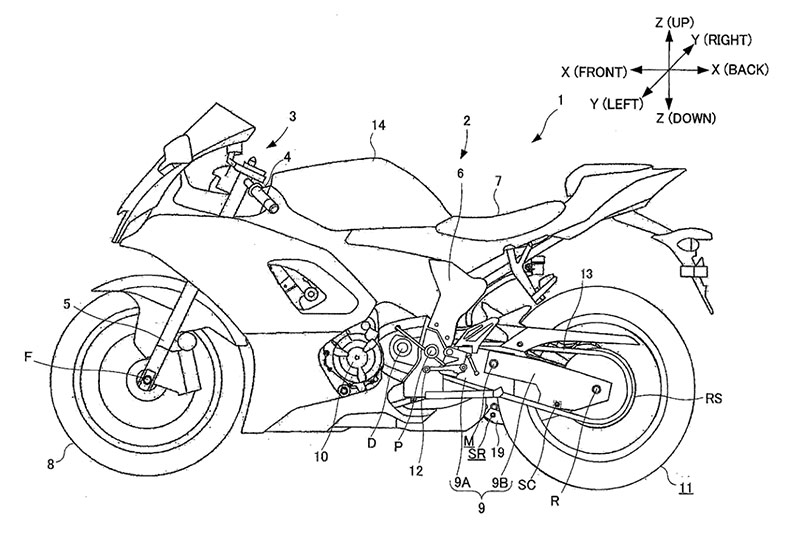
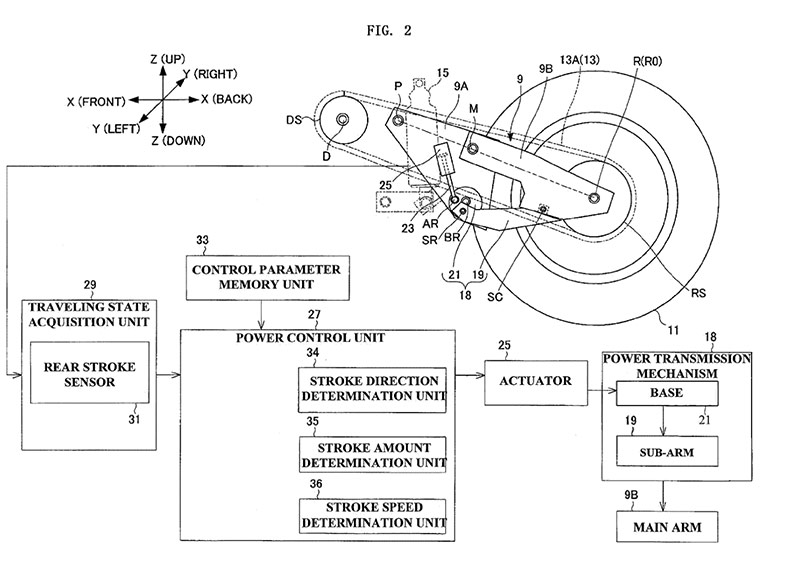
« Une moto (1) comprend un cadre (2), un arbre de pivot (P) et un bras arrière (9). L’arbre de pivot (P) est supporté par le cadre (2). Le bras arrière (9) est relié au cadre (2) via l’arbre de pivot (P). Le bras arrière (9) pivote autour de l’arbre de pivot (P) par rapport au cadre (2). Le bras arrière (9) supporte une roue arrière (11) via un axe de roue arrière (R).
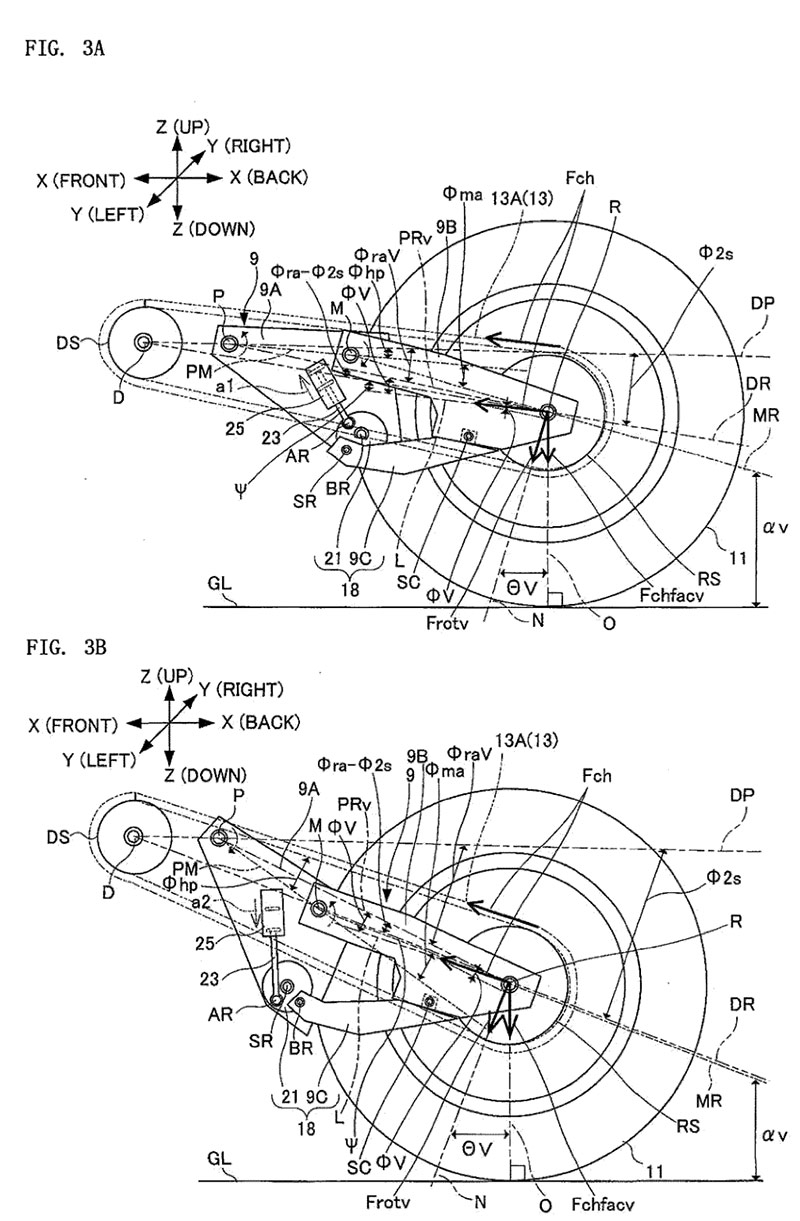
Le bras arrière (9) comprend au moins un premier bras (9A), un arbre rotatif (M) et un second bras (9B). Le premier bras (9A) est relié au cadre (2). Le premier bras (9A) pivote autour de l’arbre de pivot (P) par rapport au cadre (2). L’arbre rotatif (M) est disposé à l’extrémité arrière du premier bras (9A). Le second bras (9B) est relié au premier bras (9A) via l’arbre rotatif (M). Le second bras (9B) pivote autour de l’arbre rotatif (M) par rapport au premier bras (9A). Le second bras (9B) supporte la roue arrière (11) via l’axe de roue arrière (R). »
En résumé, un double bras oscillant articulé sur deux axes, dont on découvre ensuite que l’inclinaison entre les deux est gérée par un actuateur commandé électroniquement.
Aïe !
S’en est à priori fini la possibilité de voir cela arriver en
MotoGP, toute commande électronique liée aux suspensions étant
interdite !
Dommage car au terme des 45 pages de formules compliquées, de graphiques abscons et de tableaux du même acabit, entre autre sur les conséquences de l’effet de chaîne, ce qui nous font immanquablement penser aux travaux d’Eric Offenstadt, les promesses sont alléchantes…
« [0047] La force d’adhérence de la roue arrière peut être ajustée lors de l’accélération de la moto.
[0051] La force d’adhérence de la roue arrière peut être ajustée lors de la décélération de la moto.
[0053] La force d’adhérence de la roue arrière peut être ajustée lors du virage de la moto.
[0057] La force d’adhérence de la roue arrière peut être ajustée lorsque l’unité de commande est actionnée par le conducteur. »
Alors, pour la M1 certainement pas, mais pour la R1, pourquoi pas ?
Technique Yamaha Technique Yamaha