







Quels que soient les termes anglophones utilisés, holeshot device, start device ou ride height device, le système introduit par Ducati fin 2018 avec Jack Miller consiste à abaisser le centre de gravité de la moto pour lutter contre son cabrage, afin de pouvoir passer plus de puissance au sol.
Considéré initialement comme un gadget par la concurrence, tout comme les ailerons également remis au goût du jour par la firme de Borgo Panigale, il a prouvé son efficacité et toutes les marques en disposent aujourd’hui.
Mais le système continue à évoluer, secrètement, sans la moindre communication, aussi la photo de la GP19 d’Enea Bastianini au Grand Prix d’Autriche nous donne l’occasion de faire le point sur ce que l’on sait, ce que l’on croit savoir et ce que l’on suppose…
Le principe :
Il est simple. En
baissant indifféremment l’avant ou l’arrière de la moto, on abaisse
son centre de gravité, et celle-ci est alors moins sujette au
cabrage, que ce soit à l’accélération ou au freinage. On peut donc
passer plus de puissance à l’accélération sans que la moto ait
tendance à se retourner, et un peu plus de puissance de freinage
sans que la roue arrière décolle.
Toutefois, en pratique, cet avantage théorique se fait
principalement sentir à l’accélération car, pendant le freinage, un
transfert de charge amoindri a tendance à « pousser » la
roue avant… autrement dit à la faire glisser. Pas bon !
Dans un premier temps, les constructeurs n’ont donc logiquement
utilisé leur système qu’au moment du départ, d’où les termes de
Holeshot device et Start device.
Mise en œuvre :
Chez Ducati et la plupart des constructeurs, on a abaissé
l’arrière, chez Aprilia l’avant, et le tout
revenait à une position normale dès le premier freinage. Du moins
en principe, car on a vu par exemple Jack Miller et Fabio
Quartararo essuyer en course les plâtres de la mise au point…).
Le système est commandé manuellement, par câbles. A l’avant, il
reprend le principe utilisé depuis longtemps en cross, à savoir un
simple loquet qui vient bloquer la fourche compressée par un fort
freinage préalable. A l’arrière, les câbles sont reliés à un vérin
hydraulique monté entre le bras oscillant et le renvoi de
suspension, à la place de la simple tige filetée qu’il y avait
jusqu’alors.
Première évolution :
La plus grosse
évolution a été de se servir de ce système en sortie de virage, et
plus seulement au moment du départ. Du coup, les constructeurs se
sont concentré sur le système arrière, le blocage de la fourche ne
pouvant servir en course. C’est pourquoi on sépare maintenant dans
le vocabulaire anglais les fonctions de Ride Height Device et de
Start Device.
Évidemment, au moment du départ, on utilise conjointement les deux, et Suzuki est la dernière équipe en date à s’être équipée d’un ride height device, lors du dernier rendez-vous en Autriche, rejoignant ainsi tous les autres constructeurs.
Système Ducati :
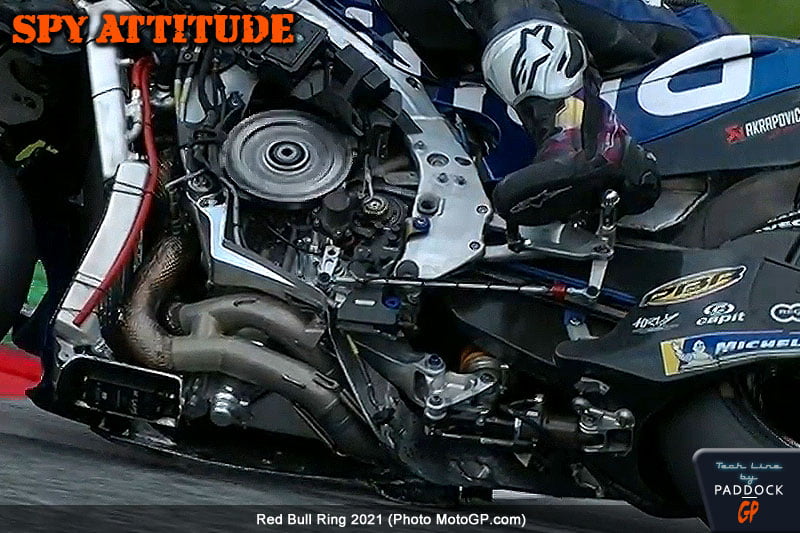
Les constructeurs ne donnant strictement aucune informations sur
leur Ride Height Device, les images de la Ducati d’Enea Bastianini
au Red Bull Ring sont donc intéressantes car il s’agit de la
première photo disponible pour le public.
On y distingue très clairement le vérin hydraulique permettant de
faire varier la longueur de la biellette reliant le bras oscillant
au renvoi de suspension.
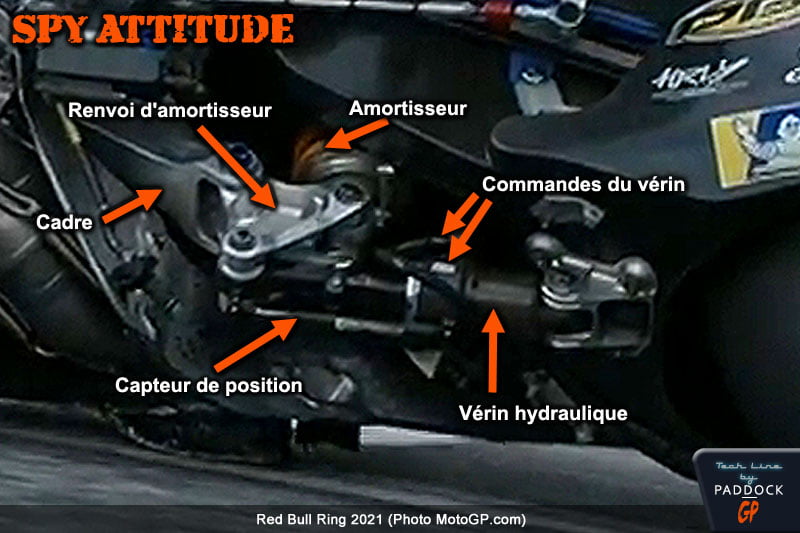
On voit également un capteur de position, sur le même principe que celui qui équipe toutes les fourches, ainsi que la commande du vérin, sous la forme de deux fils électriques, de deux câbles ou de deux conduites hydrauliques, la qualité du document ne permettant pas d’être catégorique sur ce point. Mais vu le règlement et la commande rotative du système placé sur le Té de fourche, on peut évidemment exclure une commande par fils électriques.

Règlement MotoGP (interdit dans les autres catégories):
2.4.4.4 Suspensions et amortisseurs
Les systèmes de suspension, de hauteur de caisse et
d’amortissement de la direction à commande électrique/électronique
ne sont pas autorisés.
Les réglages de la suspension et des d’amortisseurs de
direction ne peuvent être effectués que par des interventions
humaines manuelles et des dispositifs de réglage
mécaniques/hydrauliques, ou déterminés de manière passive par
forces/déplacements directement transmis par des liaisons
mécaniques/hydrauliques (par exemple, la position de la suspension,
la charge, l’accélération, le tangage, etc., peuvent être utilisés
comme déclencheurs mécaniques d’un réglage passif).
Par exemple, selon ce qui précède, les systèmes de hauteur de
caisse qui fonctionnent sur des éléments repliables qui se
replient/se déploient sous la charge à laquelle ils sont soumis, et
qui sont verrouillés/déverrouillés par le pilote et/ou par des
verrous déclenchés mécaniquement sont autorisés.
A suivre ici avec les inconvénients du système, les évolutions actuelles et futures, et les rumeurs…