








Même au-delà de 300km/h, les prototypes MotoGP sont encore capables d’accélérer fortement. À cette vitesse, la pression du vent – ou traînée aérodynamique – à l’avant de la machine allège considérablement le poids sur la roue avant, et l’ajout d’accélération peut entraîner une instabilité, voire un décollage de cette même roue. L’anti wheeling ne sert pas à ramener perpétuellement la roue avant au sol. Il fonctionne en réduisant suffisamment la puissance pour que l’extrémité avant retombe sur la piste. La réduction de la puissance ralentit l’accélération de la moto. C’est ce qu’on peut appeler un cercle vicieux : il ne faut pas trop de puissance pour ne pas engendrer de wheeling qui demanderait l’intervention de l’anti wheeling, mais il faut tout de même suffisamment de puissance pour aller plus vite que ses concurrents.
Les prototypes MotoGP ont tellement de couple que le roue avant peut décoller du sol quel que soit le rapport engagé, même au-delà de 300 km/h. Afin de limiter le wheeling, le pilote doit lâcher un peu l’accélérateur, ce qui nuit évidemment à l’accélération.
Avant de passer à l’ECU unique Magneti Marelli en 2016, l’électronique développée par les ingénieurs de chaque usine était spécifique et sur mesure. L’anti-wheeling était très high-tech. Les capteurs tels qu’une IMU mesuraient des données telless que l’accélération de la course de la suspension avant pour prédire un wheeling et anticiper celui-ci. Lorsque l’anti-wheeling était correctement configuré, il réduisait le couple juste assez pour éviter un gros wheeling, sans trop compromettre l’accélération.
Mais depuis 2016, afin de limiter les couts, Dorna a imposé un ECU et un software uniques, dont le concept est axé sur la sécurité, pas la performance. Le contrôle de traction est un problème de sécurité majeur, mais les wheelings ne le sont pas tellement, puisqu’ils limitent la performance, le pilote devant couper les gaz pour ne pas que la moto se cabre. C’est pourquoi l’algorithme développé par Magneti Marelli est assez basique, sans capacité de prédiction. C’est aussi pour cela que les ailerons sont apparus à partir de 2016, leur force d’appui permettant de maintenir la roue avant au sol et de compenser une électronique limitée.
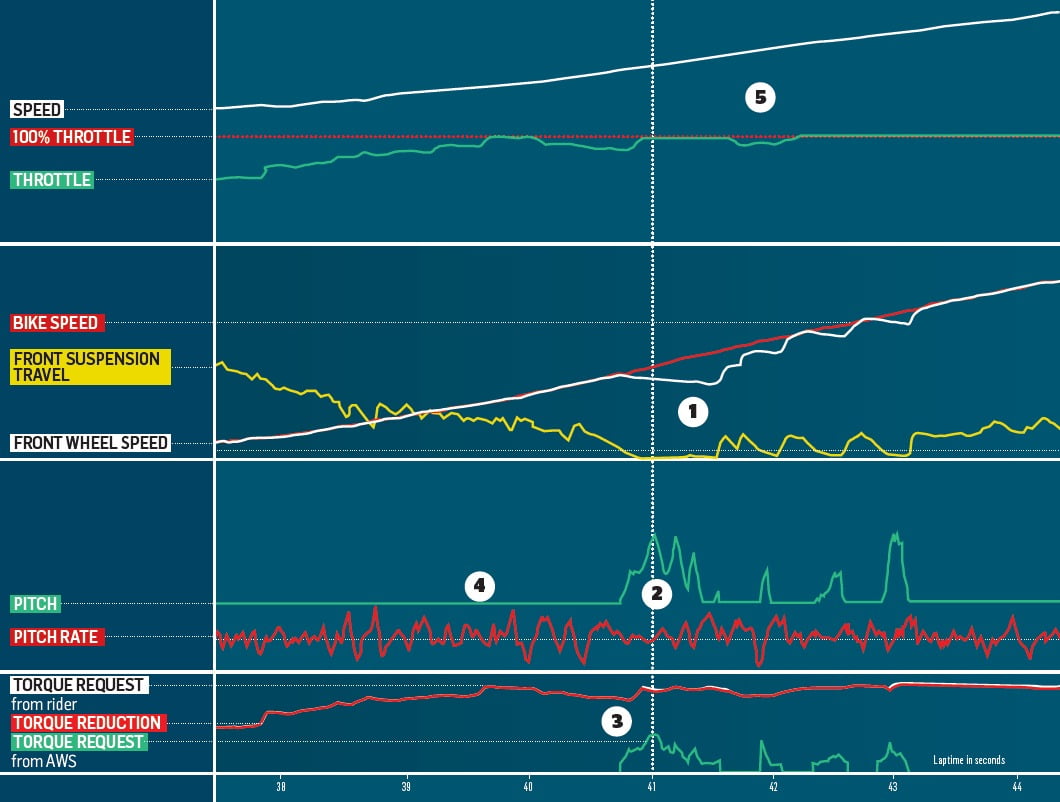
Le graphique de données ci-dessus concerne la télémétrie d’un pilote MotoGP, dont nous tairons le nom, accélérant à la sortie du virage cinq du circuit Andalou de Jerez de la Frontera. Ce virage à droite se passe sur le troisième rapport et emmène les pilotes dans la ligne droite arrière. Les wheelings sont un problème particulier ici, dû à la forte accélération.
La ligne verticale pointillée verticale blanche se situe donc 41 secondes après le début du tour, à la sortie du virage. A cet endroit, le pilote est déjà à plein régime et la roue avant décolle du sol. C’est à cet endroit que l’anti-wheeling va s’activer.
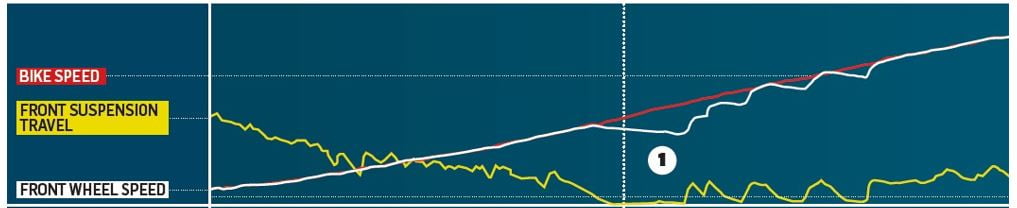
Sur le graphique ci-dessus, la ligne rouge est la vitesse de la moto, on observe bien une accélération. Dans ce cas précis, la charge se déplace vers l’arrière et soulève la roue avant, qui décélère en quittant l’asphalte. La ligne blanche est la vitesse de la roue avant, elle passe en dessous de la ligne rouge avec un écart d’environ 30 km/h : le pilote se retrouve en wheeling. Enfin, la la ligne jaune concerne le capteur de course de la suspension avant, et au niveau du repère 1, elle est complètement détendue.
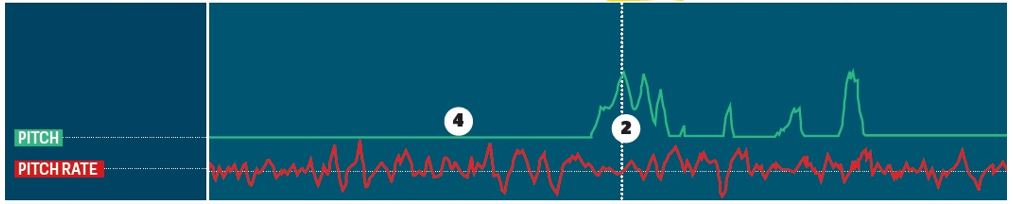
La ligne verte correspond à l’assiette de la moto. La ligne rouge est le taux de tangage, comme en aviation, relatif à l’angle d’inclinaison de la machine d’avant en arrière. La ligne en pointillé correspond au niveau de tangage nul, c’est-à-dire lorsque la moto est complètement à niveau. Tout cela est mesuré par l’IMU intégré à la machine.
Lors de l’accélération, la moto s’incline vers l’arrière. Les ingénieurs MotoGP estiment qu’une inclinaison de trois degrés est généralement acceptable, mais trois degrés avec un fort gradient indiquent que le wheeling sera important et que l’anti-wheeling doit intervenir.
La ligne rouge oscille beaucoup, car la moto est toujours en mouvement autour du circuit : vibrations, accélération, freinage, etc.

Dans le graphique ci-dessus, on observe 2 lignes superposées, qui concerne le couple moteur : l’un est la demande du pilote, en blanc, l’autre est commandé par le système anti-wheeling, en rouge. L’anti-wheeling fonctionne de la même manière que le contrôle de traction pour réduire la transmission de couple à la roue arrière. La ligne blanche montre que le pilote ouvre l’accélérateur en grand lorsque la roue avant se soulève. La ligne rouge descend légèrement sous la blanche car les capteurs de vitesse de roue, de course de la fourche, etc. demandent une intervention de l’anti-wheeling, et donc une limitation du couple fourni. La ligne verte est la différence entre les 2, et indique la réduction de couple suite à l’intervention de l’anti-wheeling.
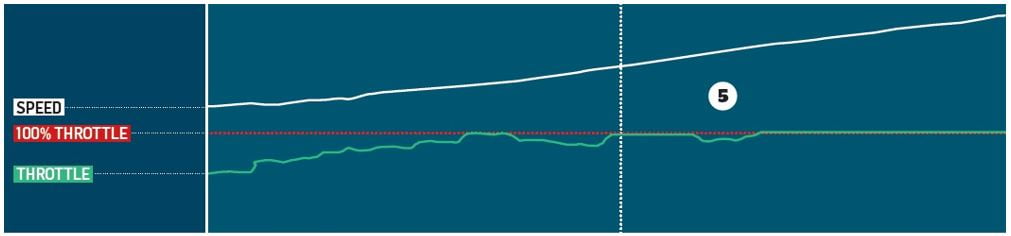
La ligne blanche concerne la vitesse de la moto, la ligne verte est l’ouverture du papillon des gaz, quant à la ligne rouge en pointillé, elle concerne l’accélération maximale.
On observe ici que le pilote relâche les gaz en raison du patinage des roues, puis du wheeling, ce qui signifie les ingénieurs datas du pilote n’ont pas encore trouvé le bon compromis de réglage à ce sujet. Au prochain passage au box, l’équipe technique paramètrera différemment l’anti-wheeling, afin de limiter le couple dans cette zone. Le pilote n’aura donc plus besoin d’effectuer une action sur les gaz et pourra ouvrir en grand, sa moto gardant les 2 roues au sol, la magie de l’électronique faisant le reste.


Photos : Dorna Sport – Graphes : Mat Oxley