








Marc Marquez a été victime d’un problème électronique lors de la FP2 du Grand Prix des Pays Bas : catapulté dans les airs par sa machine, l’octuple Champion du Monde s’est retrouvé dans le bac à graviers mais s’en sort miraculeusement indemne après une figure effrayante qui rappelait beaucoup celle de son accident à Jerez en 2020. Fort heureusement pour lui, cela n’interrompt pas le processus de guérison de la blessure de son humérus droit. Cependant, lors du débriefing médiatique, Marc Marquez était très préoccupé par ce qui avait causé le crash de la RC213V, qui selon lui n’était pas le premier cas auquel Honda devait faire face.
Il semblerait que le highside qu’a connu Marc Marquez s’est produit en raison de la défaillance du système de contrôle de traction du pneu arrière de sa Honda RC213V, qui arrive dans certaines situations spécifiques. Sur une moto de route, le contrôle de traction est un système électronique intégré à l’ECU qui compare toujours la vitesse des roues avant et arrière, et a la charge de réduire celle-ci en diminuant le couple moteur, via les papillons des gaz, l’allumage ou l’injection. Sur une moto de compétition, d’autres paramètres entrent en compte, compte tenu des performances exceptionnelles de ces prototypes.
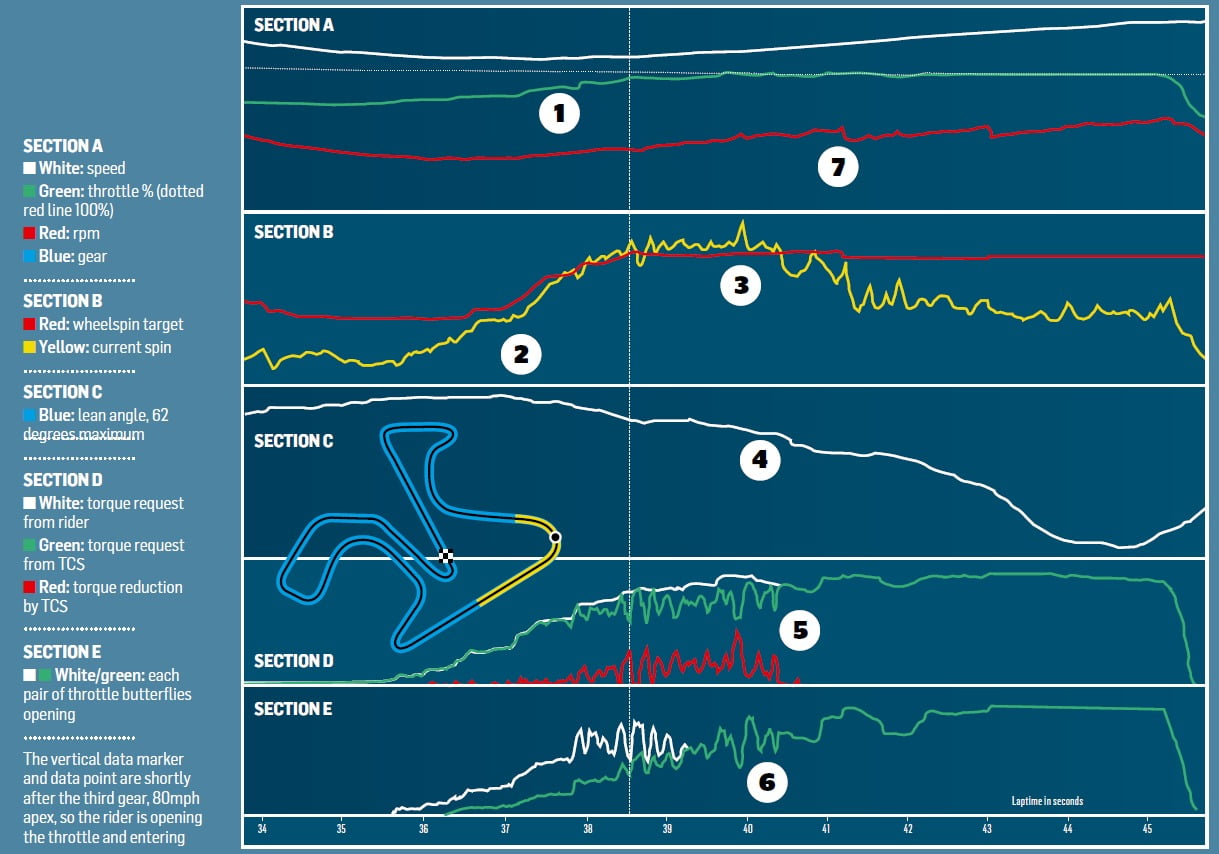
Alors comment ça marche, le contrôle de traction ? Pour donner un sens au graphique, qui couvre une dizaine de secondes du fonctionnement de la moto, il s’agit du virage cinq à Jerez, également connu sous le nom de virage Sito Pons, qui est représenté par la zone jaune sur la carte du circuit. Dans cette courbe, un pilote MotoGP passe à 128km/h environ, en ayant rétrogradé au troisième rapport. Ce virage est également une « zone de patinage », parfaite pour illustrer le contrôle de traction. En sortie du virage 5, le pilote passage les vitesses 4 et 5 avant d’entrer dans la ligne droite.
Afin de rendre ces données de télémétrie plus simples à appréhender, il faut décomposer par section.
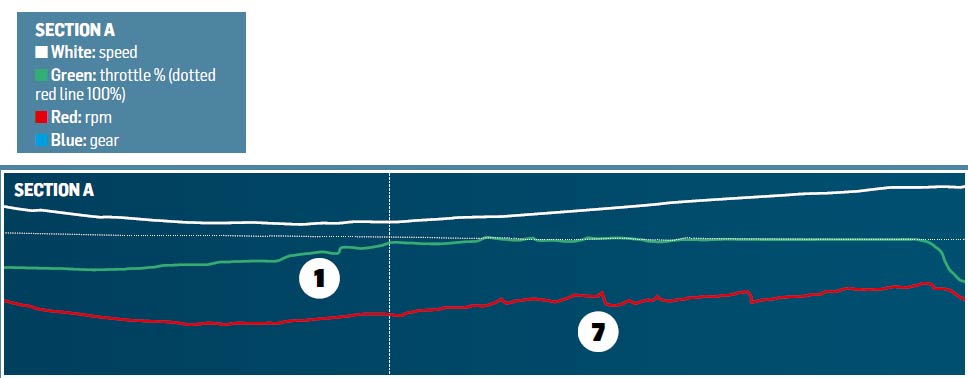
Dans le graphique ci-dessus, la ligne verte correspond au pourcentage d’ouverture des gaz. La ligne blanche en pointillé correspond à 100% des gaz. Ici, le pilote ouvre la poignée de gaz par paliers : il applique plus de gaz, puis réduit son action sur les gaz de 2 à 10 % lorsqu’il sent le pneu patiner. Lorsque le pneu regagne de l’adhérence, il applique plus de gaz, puis en rend un peu et ainsi de suite.
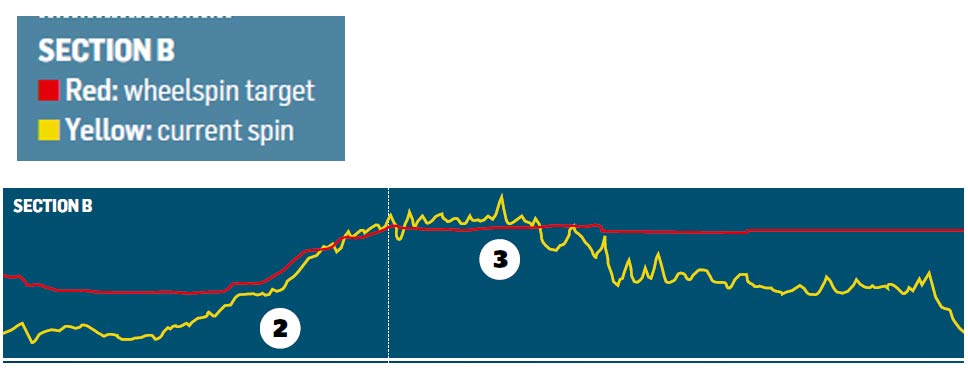
Sur cette zone de graphique, la ligne rouge est la référence de patinage du pneu arrière, la ligne jaune est la rotation réelle de celui-ci. Lorsque la moto commence à se relever après avoir atteint son angle d’inclinaison maximal, l’objectif de patinage est très faible : de 0 à 2%, selon les préférences du pilote.
Au fur et à mesure que le pilote relève sa machine pour sortir du virage, la tolérance de patinage augmente car le pneu arrière et le pilote peuvent le gérer plus facilement. La plupart des pilotes autorisent ainsi le contrôle de traction à donner un maximum de 12 à 15 % de patinage en sortie de courbe – différence en entre la vitesse de la roue arrière et celle de la moto.
Ainsi, le capteur de vitesse de la roue a son importance pour le contrôle de traction, afin que l’ECU puisse la comparer à la théorie, calculée en fonction du régime moteur, du rapport de boite et de la démultiplication.
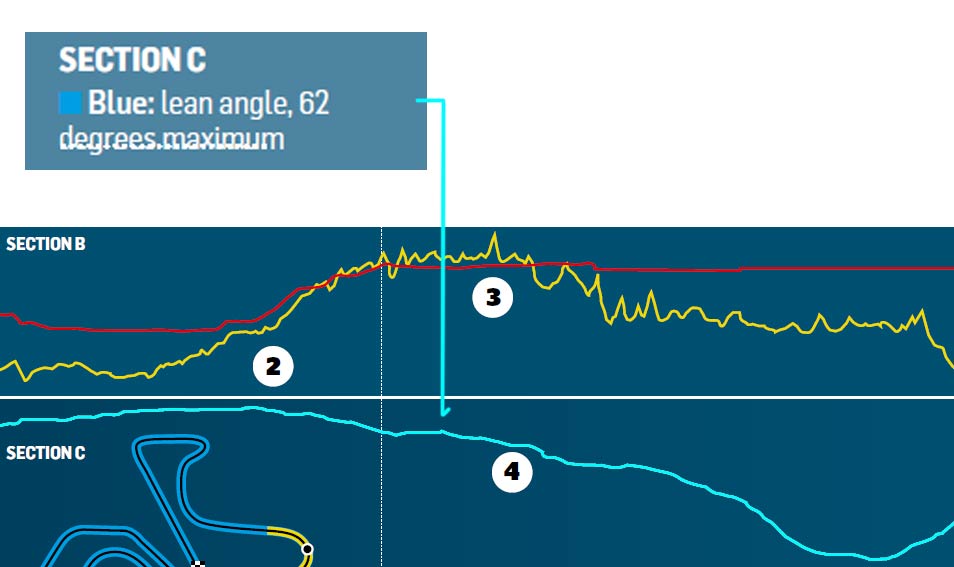
Ici, la ligne rouge est également la référence de patinage du pneu arrière, la ligne jaune est la rotation réelle quant à la ligne bleue, elle correspond à l’angle d’inclinaison. Les données de télémétrie fournissent des informations graphiques en temps réel sur l’angle que prend le pilote en courbe, ci-dessus, 62°. On observe que quand la moto est sur l’angle maxi, alors le patinage des roues est minime. Et c’est tant mieux, car cela peut mener à la chute.
Le patinage est plus important à mesure que le pilote relève sa moto, ici quand le trait bleu va vers le bas.
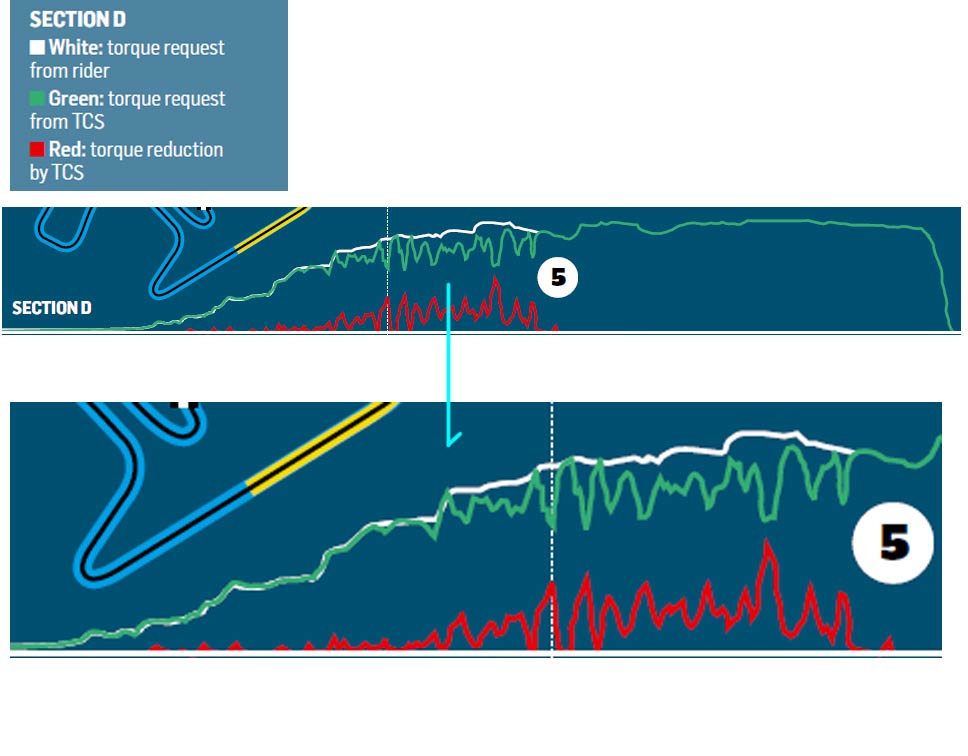
Sur ce graphique, la ligne blanche est le couple demandé par le pilote via la poignée d’accélérateur ride-by-wire, la verte est le couple délivré par le contrôle de traction, en fonction du patinage, et la rouge indique la réduction de couple par le contrôle de traction.
Ainsi, la ligne verte est la ligne rouge soustraite de la ligne blanche et indique le couple réel délivré. La question est : pourquoi la demande du pilote et ce qui est fourni par le contrôle de traction sont différents ?
Au niveau de la section D, la ligne blanche montre que le pilote devient gourmand avec l’accélérateur : le capteur de vitesse sur la roue arrière détecte que la vitesse du pneu dépasse la tolérance/référence de vitesse calibrée. Cela provoque un pic de patinage des roues, au niveau du marqueur 3, ce qui nécessite une action urgente du contrôle de traction. La conséquence est une réduction du couple fourni au pneu arrière. On note que le pilote ne coupe pas les gaz, car il a suffisamment redressé la moto et il sait que le contrôle de traction est efficace. Ainsi, la ligne verte est ce qui fait que le patinage du pneu arrière maintient sa tolérance tel qu’il a été réglé par le pilote et son équipe.
En MotoGP, le contrôle de traction est différent selon l’angle d’inclinaison, il est à son maximum lorsque la moto est entre 40 et 60° d’inclinaison. Dans le logiciel Magneti Marelli, celui-ci est contrôlé par de nombreux paramètres et réduit le patinage des roues de trois manières : en fermant les papillons des gaz et/ou en retardant l’allumage et/ou en coupant les allumages d’un ou plusieurs cylindres.
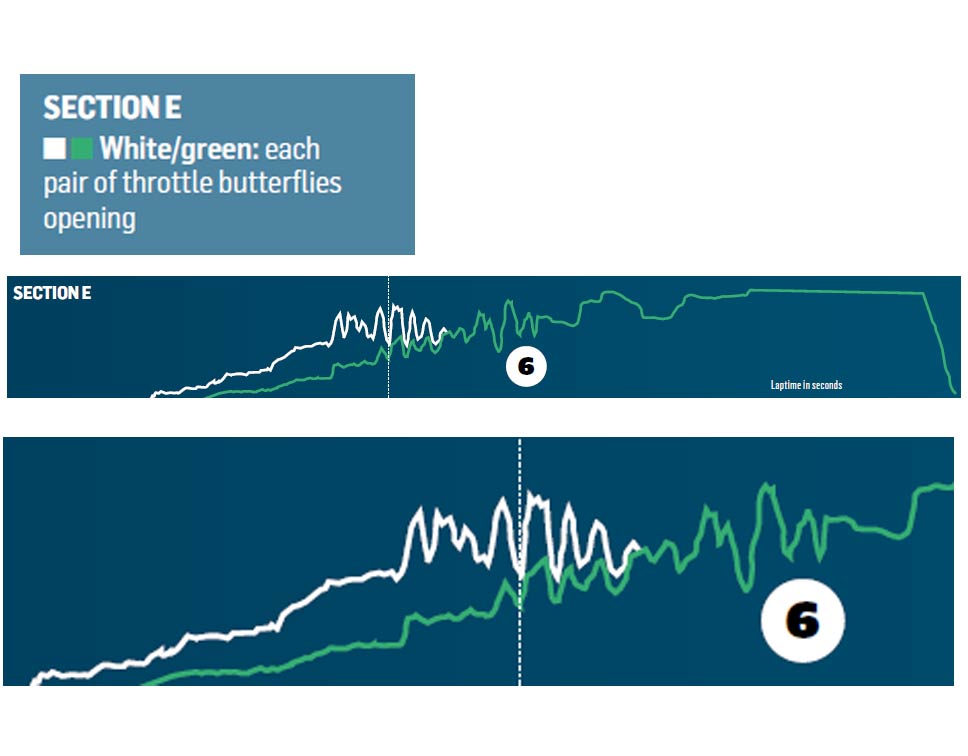
Enfin, dans la section E qui est reprise ci-dessus, il y a deux lignes, verte et blanche, qui ont un comportement différent puis finissent par fusionner en une seule. Elles correspondent chacune à un ensemble de 2 papillons, soit pour les cylindres avants, soit pour les cylindres arrières du moteur en V.
Au début de la sortie de virage, les deux paires de papillons des gaz ne sont pas synchronisées – elles s’ouvrent de manière asymétrique pour une livraison de puissance plus fluide. De nombreuses équipes mappent une paire de corps de papillon directement sur l’accélérateur, de sorte que le pilote ait une connexion directe avec le pneu arrière, tandis que l’autre paire est gérée par le contrôle de traction.
Le pilote demande beaucoup de couple, qui est visible sur la ligne blanche, et délivré par un des 2 corps papillons, mais le second corps papillon, contrôlé par le contrôle de traction, limite le couple, car le capteur de rotation du pneu arrière détecte une rotation excessive. Puis, à mesure que le patinage se réduit, l’intégralité du couple demandée par le pilote est délivrée par le contrôle de traction.
En MotoGP, selon les réglages des pilotes, à la première ouverture des gaz, le contrôle de traction peut réduire le couple de 50 %, ce qui bride le moteur de 10 ch environ.
La fermeture des papillons des gaz est le moyen le plus doux de réduire le couple, mais ce n’est pas suffisant dans les situations d’urgence, lorsque le système applique également un retard à l’allumage voire une coupure de celui-ci, réduisent le couple beaucoup plus rapidement. Cela s’entend à l’oreille : le retard d’allumage engendre un bruit plus sourd à l’échappement, alors que les coupures d’allumage le font pétarader. Néanmoins, ces interventions « violentes » sur le couple moteur ont aussi un impact sur le comportement de la moto, et peuvent par exemple faire pomper les suspensions.
Il faut se remettre en tête que cette analyse ne concerne qu’un seul virage, dont le passage se fait en environ 10 secondes en MotoGP. Cela rappelle à quel point l’analyse et le travail acharné des pilotes et de leurs équipes techniques sont compliqués figurer dans le haut du classement de la catégorie reine !

Concernant la chute de Marc Marquez, il avait accusé l’électronique. « Seuls les pilotes Honda tombent en faisant des highsides et c’est pourquoi je presse les ingénieurs. C’est très similaire à l’accident de 2020 à Jerez», a souligné le pilote Honda à propos du schéma qu’il voit dans ces accidents, avant d’ajouter « Nous devons comprendre l’électronique pour éviter ces chutes. Si vous faites ce que vous avez fait le tour précédent mais avec moins d’angle, il y a quelque chose qui ne va pas et nous devons comprendre. Je ne m’attendais pas à tomber car dans cette courbe. Je n’ai pas coupé les gaz pour voir si le contrôle de traction allait entrer et récupérer la moto » précisait-il.
En effet, le contrôle de traction est réglé de manière différente pour les moteurs V4, comparé aux 4 cylindres en ligne. Le moteur plus étroit d’un V4 réduit l’effet gyroscopique, de sorte que le pilote peut faire entrer la moto en courbe plus facilement. Un quatre en ligne, avec son vilebrequin plus long, est plus difficile à détourner de sa trajectoire lorsque le pilote veut entrer en courbe. Mais une fois que la moto est dans la courbe, l’effet gyroscopique aide le pilote à maintenir sa trajectoire. C’est une des raisons pour lesquelles les prototypes MotoGP à 4 cylindres en ligne sont plus efficaces en courbe.
Ainsi, contrairement aux 4 cylindres en ligne qui arrondissent au maximum leur trajectoire afin d’optimiser le passage en courbe et de rester sur leur lancée, les prototypes MotoGP équipées d’un moteur V4 décomposent le virage et la trajectoire a une forme de V : les pilotes font dériver légèrement l’arrière de la moto pour atteindre le point de corde avant de relever la machine et d’accélérer en sortie du virage. Il semble que ce que Marc Marquez veut dire, c’est que les paramètres électroniques du contrôle de traction de la RC213V n’étaient pas optimaux et dépassaient les limites des paramètres de glisse nécessaires à cette machine pour l’aider dans les virages.
Stefan Bradl a depuis apporté des précisions sur cet épisode : « nous avions eu ce problème lors du dernier test des 23/24 juin à Misano et nous l’avions résolu. Mais la mise à jour n’a été mise en œuvre pour Marc à Assen que le samedi. C’était l’une des choses que nous avions à l’ordre du jour à Misano. Nous avons travaillé dessus. Samedi, c’était au sein de l’équipe Repsol à Assen. Et ça a marché ». C’est là tout l’art des réglages, savoir trouver le compromis entre sécurité, efficacité, et danger !
