Destiné à l’origine au freinage et à être actif, plutôt qu’en phase d’accélération et contrôlé par le pilote, le système de correction de l’assiette de la moto en roulant avait été breveté en 2002 par Claudio Domenicali, à l’époque Responsable de Ducati Corse et actuellement PDG de Ducati Motor Holding.
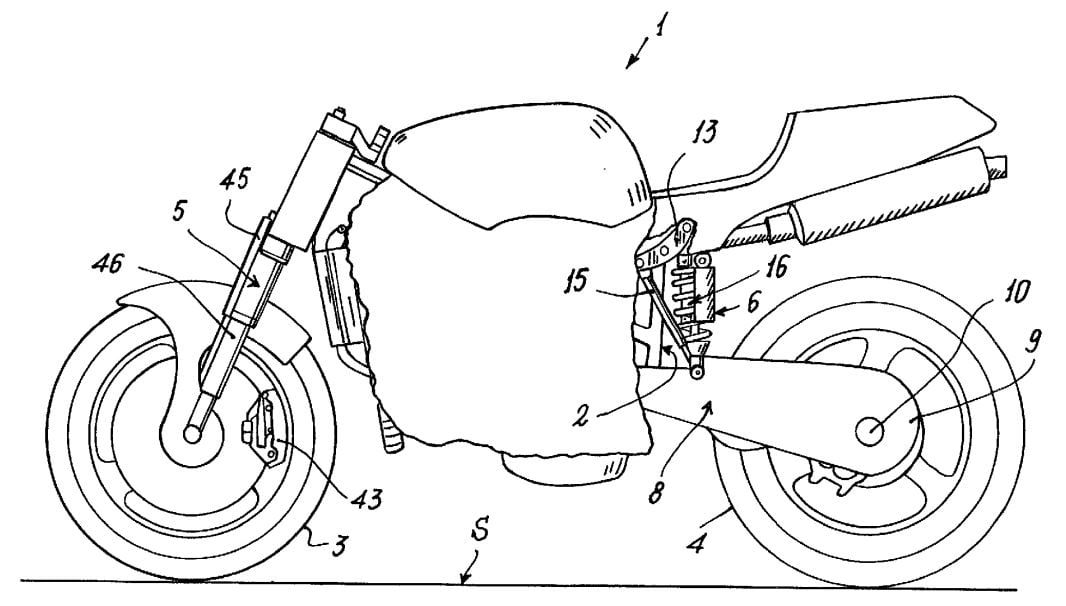
Un brevet déposé par Ducati il y a bientôt 20 ans, rédigé par Claudio Domenicali et Filippo Preziosi, décrit un système de suspension arrière avec un actionneur hydraulique dans la tringlerie qui permet d’ajuster automatiquement la hauteur du châssis. La demande et le brevet émis sont intitulés « Moto avec suspension arrière active offrant un freinage amélioré ». Bien qu’il ne s’agisse en aucun cas d’un système entièrement actif, le concept de base et le premier élément constitutif sont là.
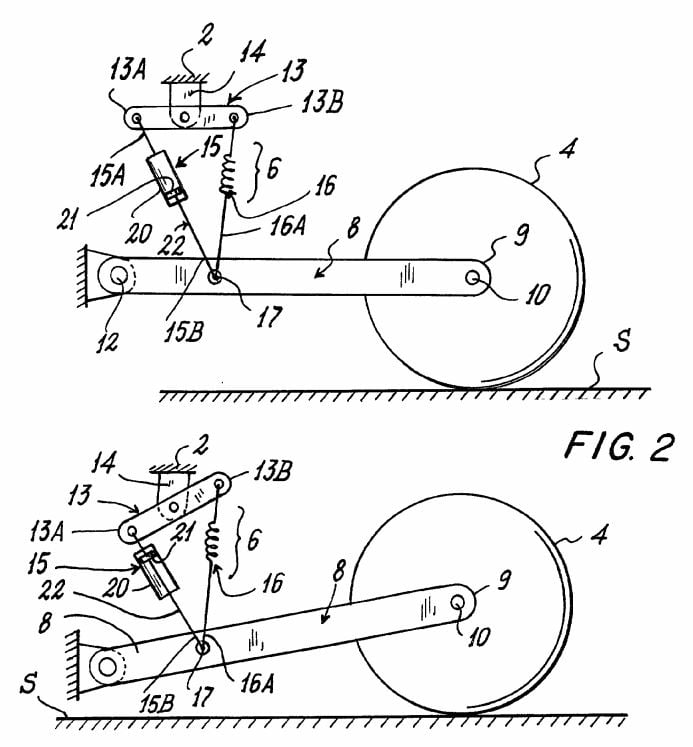
Le système détecte lorsque la moto freine, soit via un capteur de pression, un capteur de course situé sur la fourche ou si l’accélérateur est refermé brusquement, et abaisse l’arrière de la moto en repliant l’actionneur. Cela abaisse le centre de gravité général et permet au pilote de freiner plus agressivement sans que la roue arrière de la moto ne quitte le sol. Une fois le freinage terminé, l’actionneur revient à sa position initiale, ramenant le châssis à sa position normale.
Fonctionnant uniquement au freinage, le vérin n’aurait pas à vocation de modifier rapidement la hauteur du châssis : un système entièrement actif doit pouvoir déplacer la roue en quelques millisecondes, et c’est la différence essentielle entre ce qui est décrit dans le brevet Ducati et un système de suspension réellement actif. La technologie de suspension active est disponible et certaines automobiles haut de gamme en sont équipées, mais pour les motos, la principale pierre d’achoppement est l’actionneur. Les unités électromécaniques utilisées sont encombrantes et nécessitent une quantité considérable d’énergie électrique. De plus, même si les vérins hydrauliques sont de taille conventionnelle, ils nécessitent des pompes et de la puissance pour les faire fonctionner.
Jusque-là abandonnée par Ducati, Gigi ‘Gadget’ Dall’Igna a utilisé l’idée de son Directeur actuel en l’adaptant à une nouvelle problématique et à la règlementation MotoGP actuelle. Ainsi, le système actuel permet de gérer la géométrie et le centre de gravité de la moto pendant la phase de sortie de virage, en accélération, et est actionnée par une manette au guidon, étant donné qu’un système automatique est interdit par le règlement. Nous avions rédigé un dossier complet à ce sujet.
La suite de l’histoire est connue, tous les teams se sont penchés sur le sujet l’année passée. Comme quoi, cela ne sert à rien de réinventer la roue…